1单闭环直流调速系统概述从生产机械要求控制的物理量来看,电力拖动自动控制系统有调速系统、位置随动系统、张力控制系统等多种类型,而各种系统往往都是通过控制转速来实现的,因此调速系统是最基本的拖动控制系统
相比于交流调速系统,直流调速系统在理论上和实践上都比较成熟
直流调速是现代电力拖动自动控制系统中发展较早的技术
在20世纪60年代发展起来的电力电子技术,使电能可以变换和控制,产生了现代各种高效、节能的新型电源和交直流调速装置,为工业生产,交通运输,楼宇、办公、家庭自动化提供了现代化的高新技术,提高了生产效率和人们的生活质量,使人类社会生产、生活发生了巨大的变化
随着新型电力电子器件的研究和开发以及先进控制技术的发展,电力电子和电力拖动控制装置的性能也不断优化和提高,这种变化的影响将越来越大
2MATLAB简介在1980年前后,美国的Cleve博士在NewMexico大学讲授线性代数课程时发现应用其它高级语言编程极为不便,便构思并开发了Matlab(MATrixLABoratory,即矩阵实验室),它是集命令翻译,科学计算于一身的一套交互式软件系统,经过在该大学进行了几年的试用之后,于1984年推出了该软件的正式版本,矩阵的运算变得异常容易
MATLABSGI由美国MathWorks公司开发的大型软件
在MATLAB软件中,包括了两大部分:数学计算和工程仿真
其数学计算部分提供了强大的矩阵处理和绘图功能
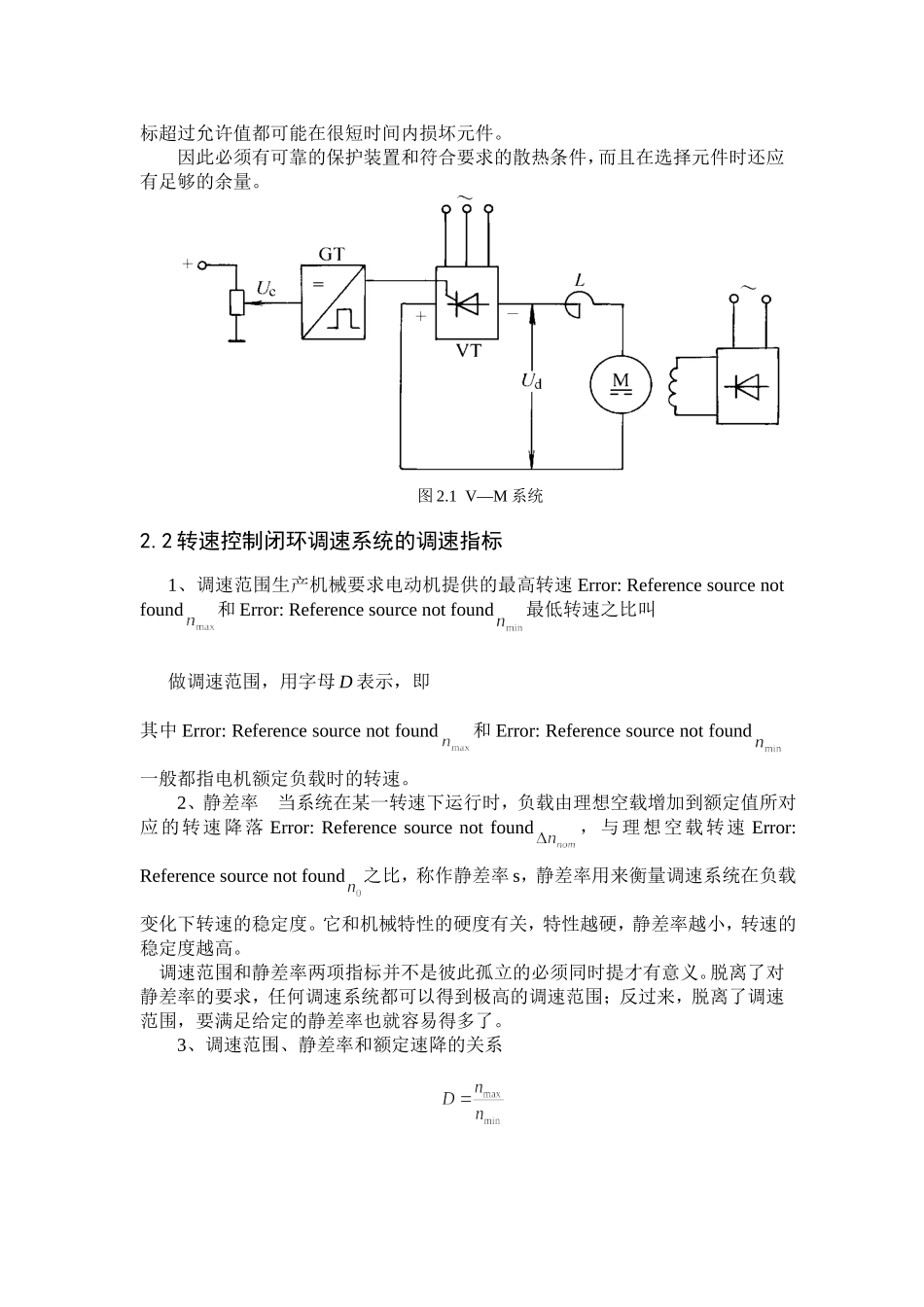
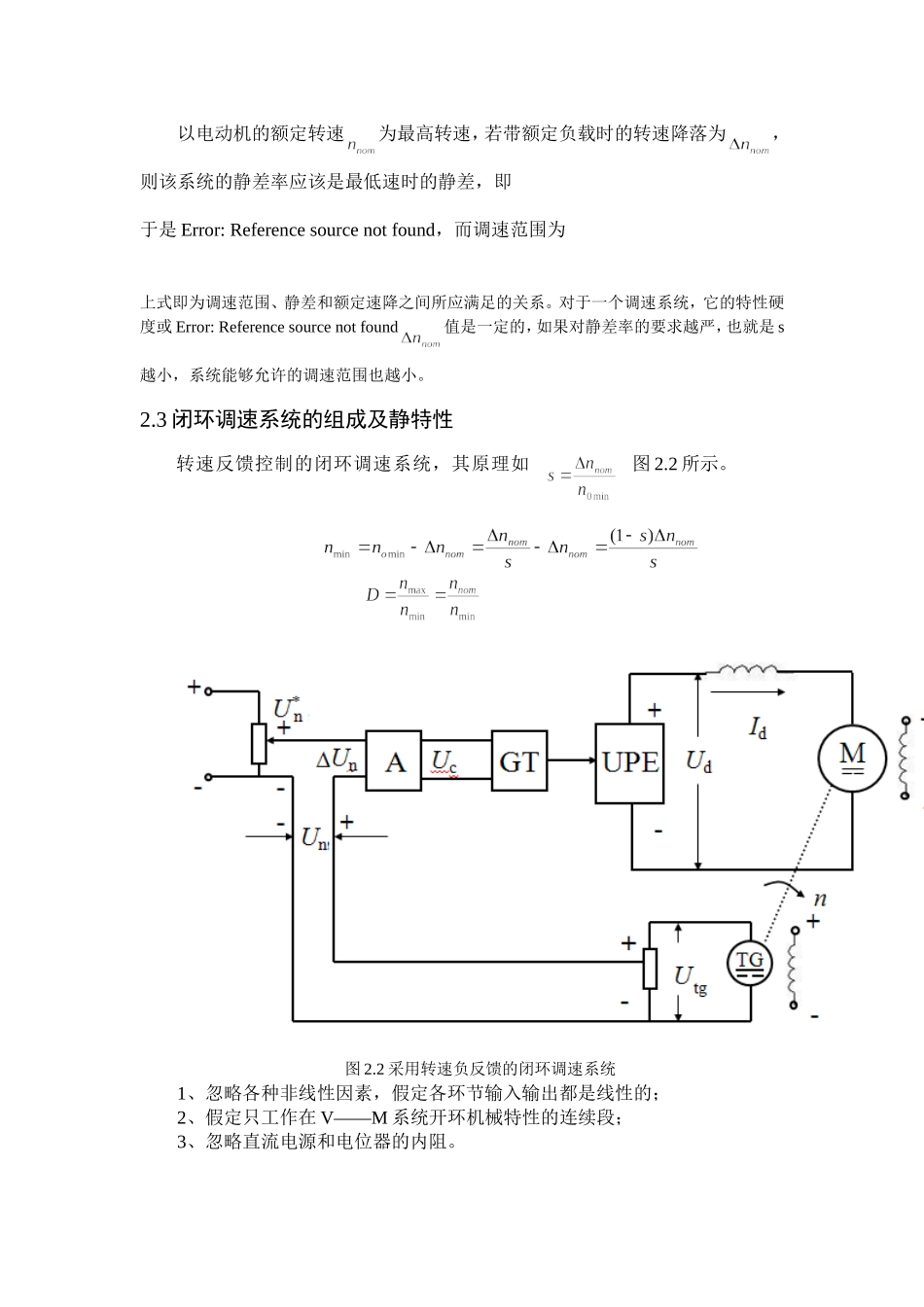
在工程仿真方面,MATLAB提供的软件支持几乎遍布各个工程领域通过对单闭环调速系统的组成部分可控电源、由运算放大器组成的调节器、晶闸管触发整流装置、电机模型和测速电机等模块的理论分析,比较开环系统和闭环系统的差别,得出直流电机调速系统的最优模型
然后用此理论去设计一个实际的调速系统,并用MATLAB仿真进行正确性的验证
2控制直流调速系统简介2
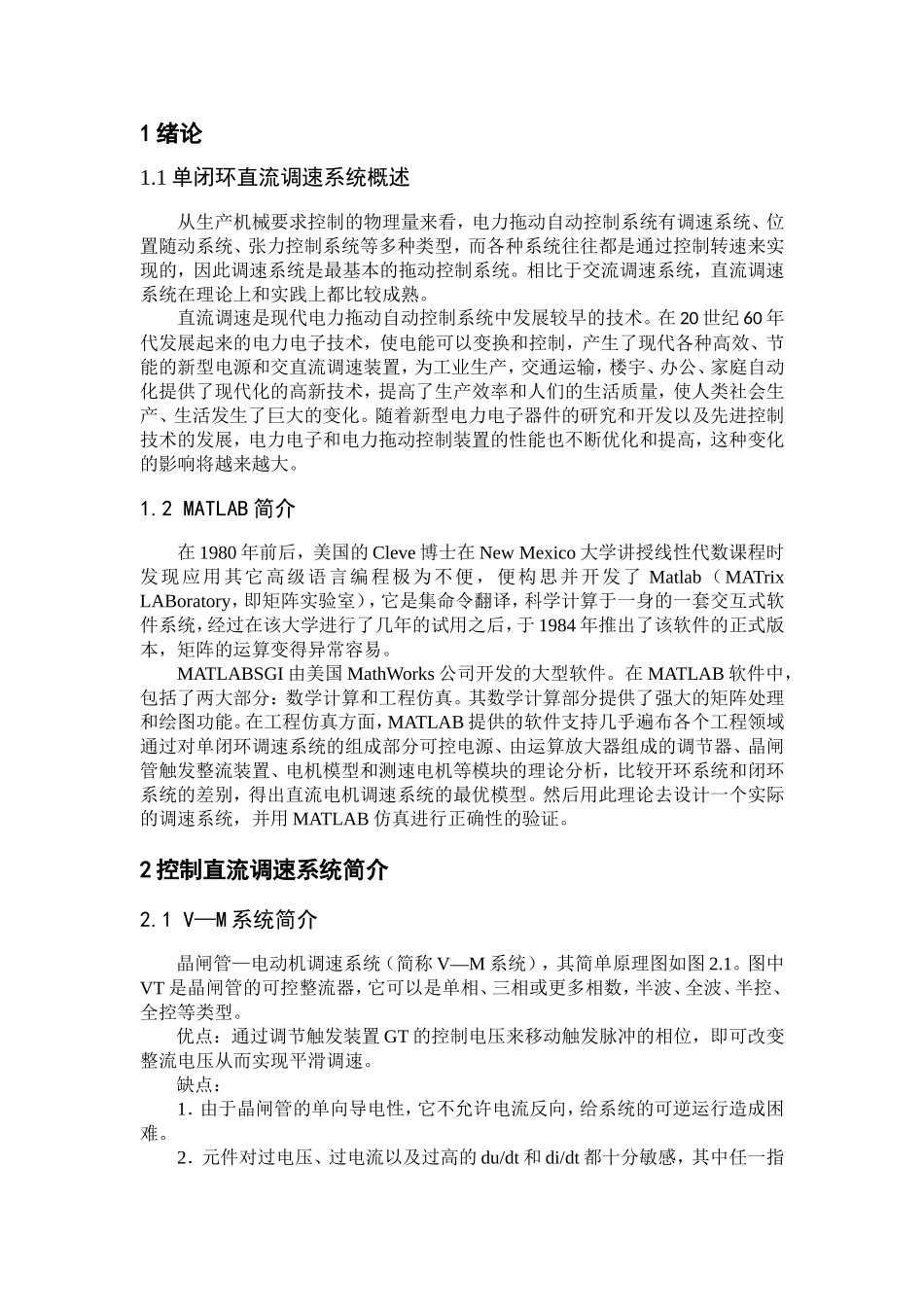
1V—M系统简介