电气工程及其自动化专业方向课程设计一、设计任务1、了解并熟悉双闭环三相异步电机调压调速原理及组成
2、学习SIMULINK,熟悉相关的模块功能
3、进一步理解交流调压系统中电流环和转速环的作用
二、设计要求1、利用SIMULINK建立闭环调速系统仿真模型
2、调试完成调压模块仿真、开环系统仿真、闭环系统仿真
三、实验设备1、计算机一台2、MATLAB仿真软件四、实验原理调压调速即通过调节通入异步电动机的三相交流电压大小来调节转子转速的方法
理论依据来自异步电动机的机械特性方程式:其中,p为电机的极对数;w1为定子电源角速度;U1为定子电源相电压;R2’为折算到定子侧的每相转子电阻;R1为每相定子电阻;L11为每相定子漏感;L12为折算到定子侧的每相转子漏感;S为转差率
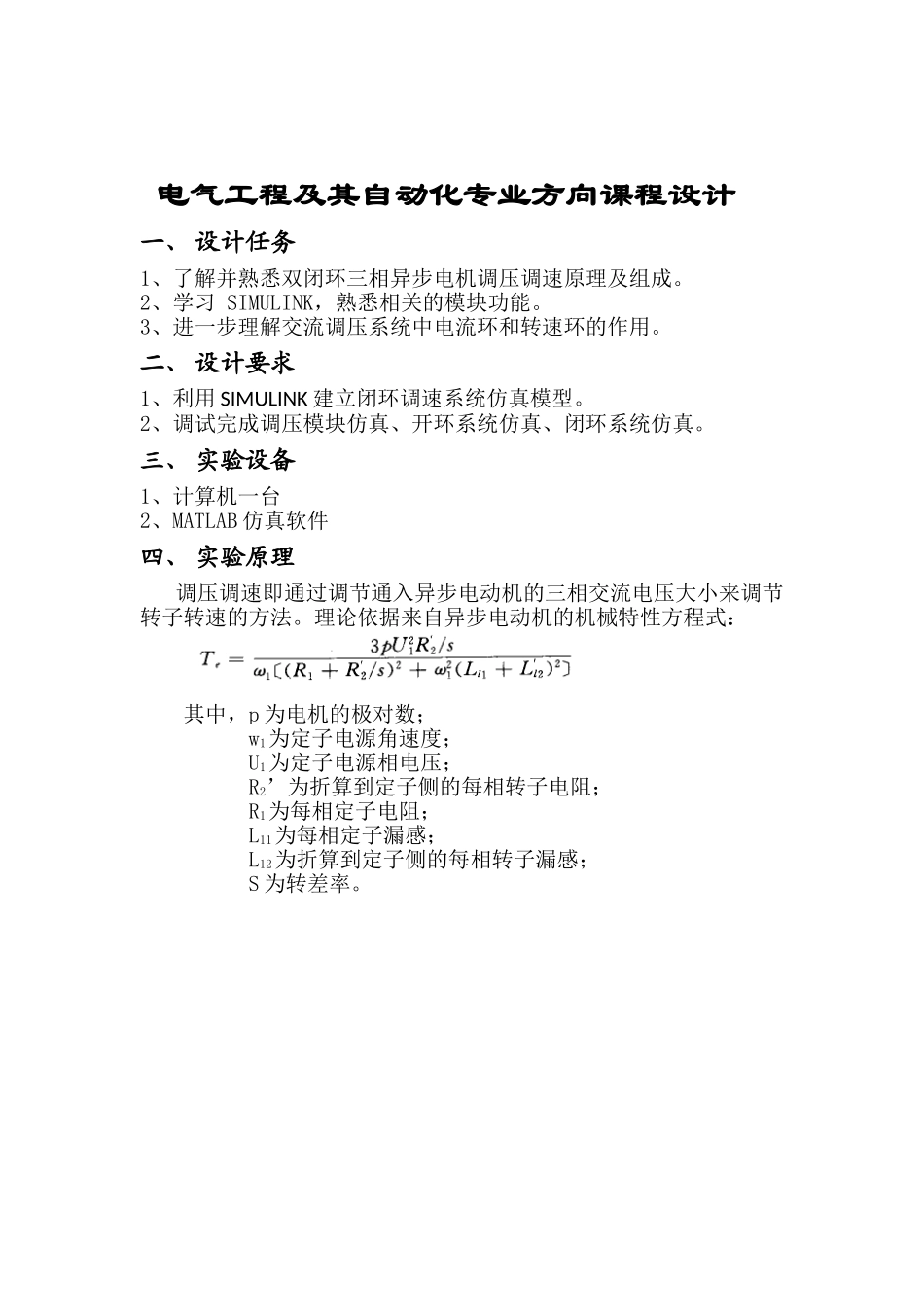
图1异步电动机在不同电压的机械特性由电机原理可知,当转差率s基本保持不变时,电动机的电磁转矩与定子电压的平方成正比
因此,改变定子电压就可以得到不同的人为机械特性,从而达到调节电动机转速的目的
1、调压电路改变加在定子上的电压是通过交流调压器实现的
目前广泛采用的交流调压器由晶闸管等器件组成
它是将三个双向晶闸管分别接到三相交流电源与三相定子绕组之间通过调整晶闸管导通角的大小来调节加到定子绕组两端的端电压
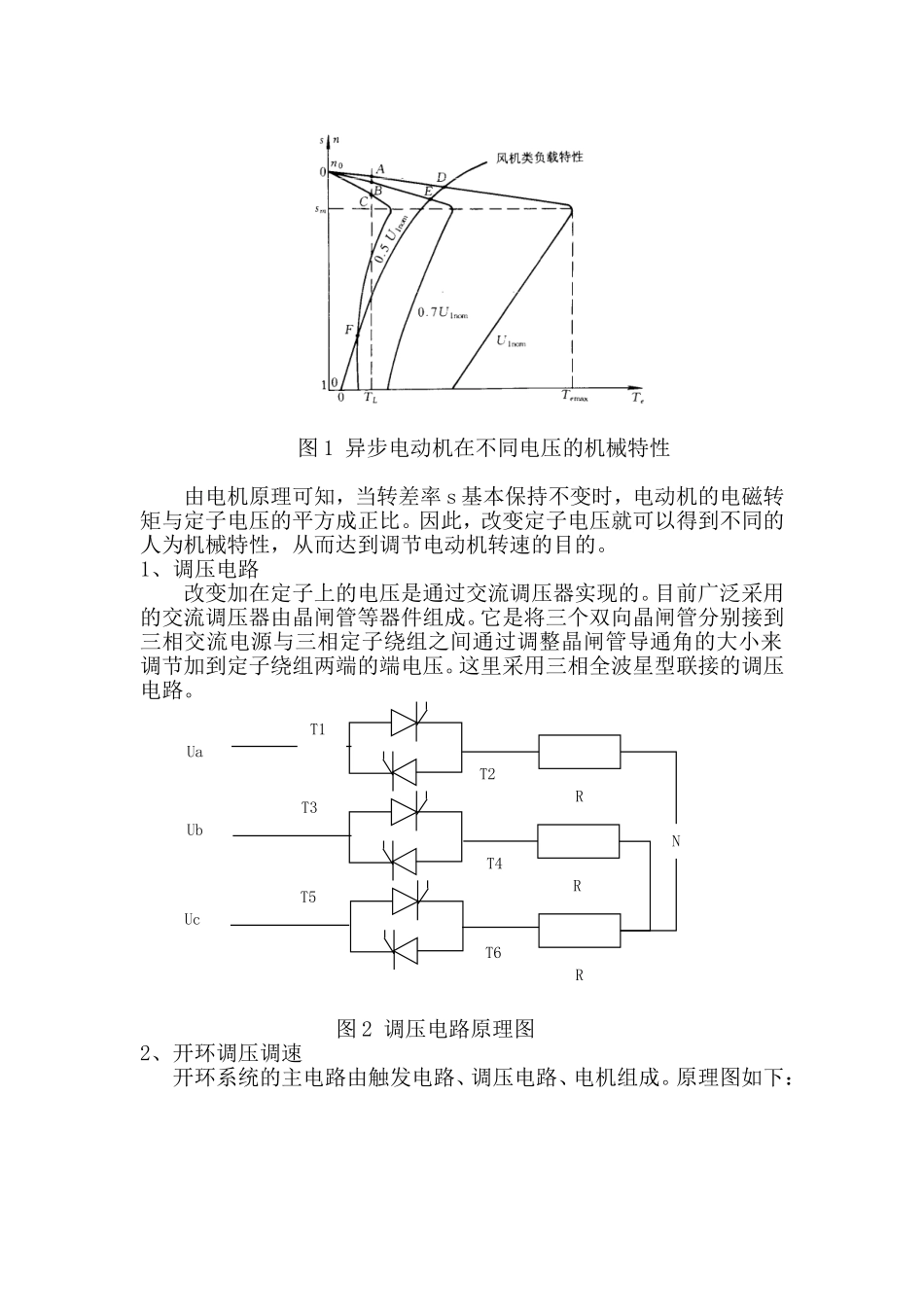
这里采用三相全波星型联接的调压电路
图2调压电路原理图2、开环调压调速开环系统的主电路由触发电路、调压电路、电机组成
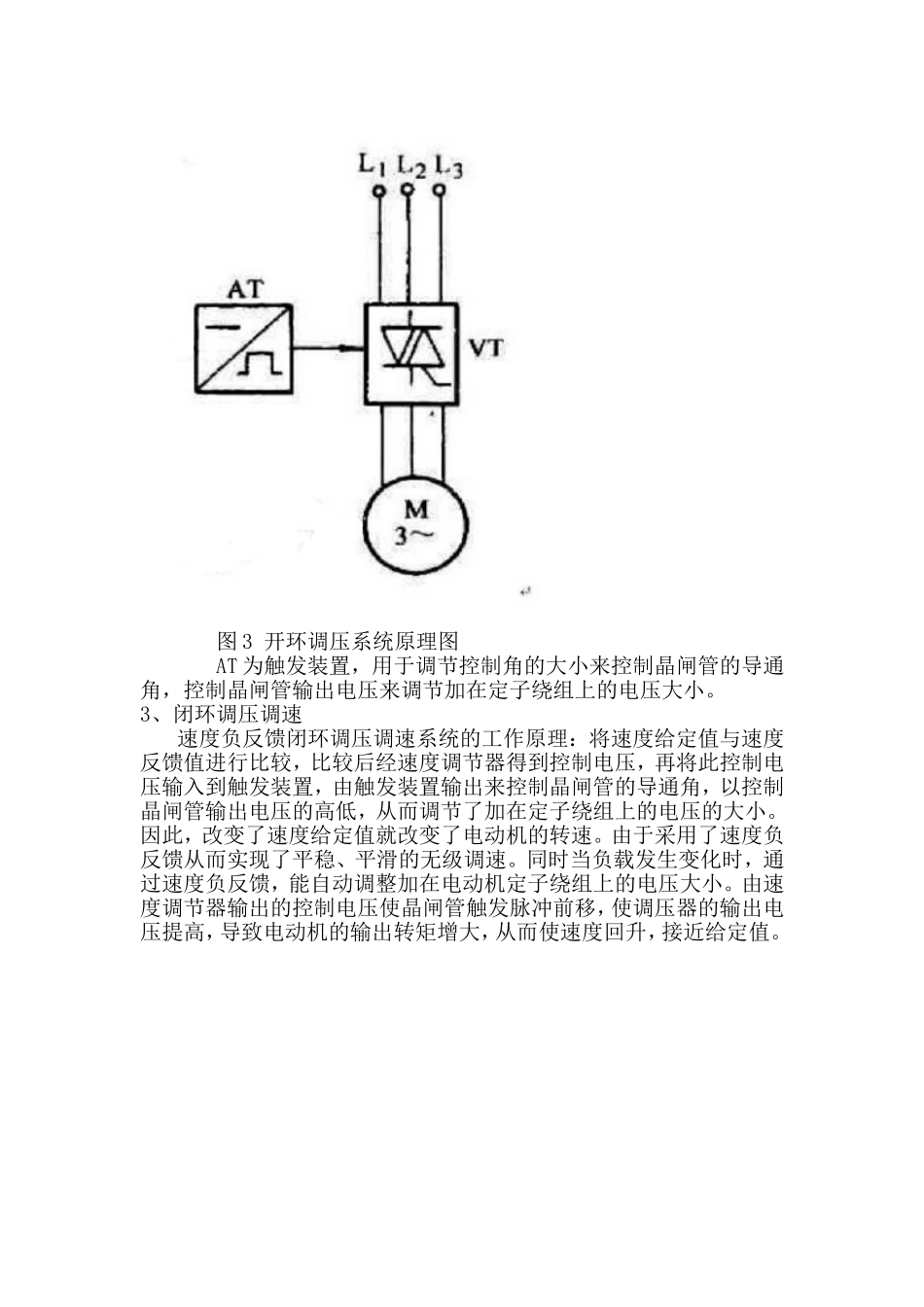
原理图如下:UaUbUcT2T3T5T4T6RRRNT1图3开环调压系统原理图AT为触发装置,用于调节控制角的大小来控制晶闸管的导通角,控制晶闸管输出电压来调节加在定子绕组上的电压大小
3、闭环调压调速速度负反馈闭环调压调速系统的工作原理:将速度给定值与速度反馈值进行比较,比较后经速度调节器得到控制电压,再将此控制电压输入到触发装置,由触发装置输出来控制晶闸管的导通角,以控制晶闸管输出电压的