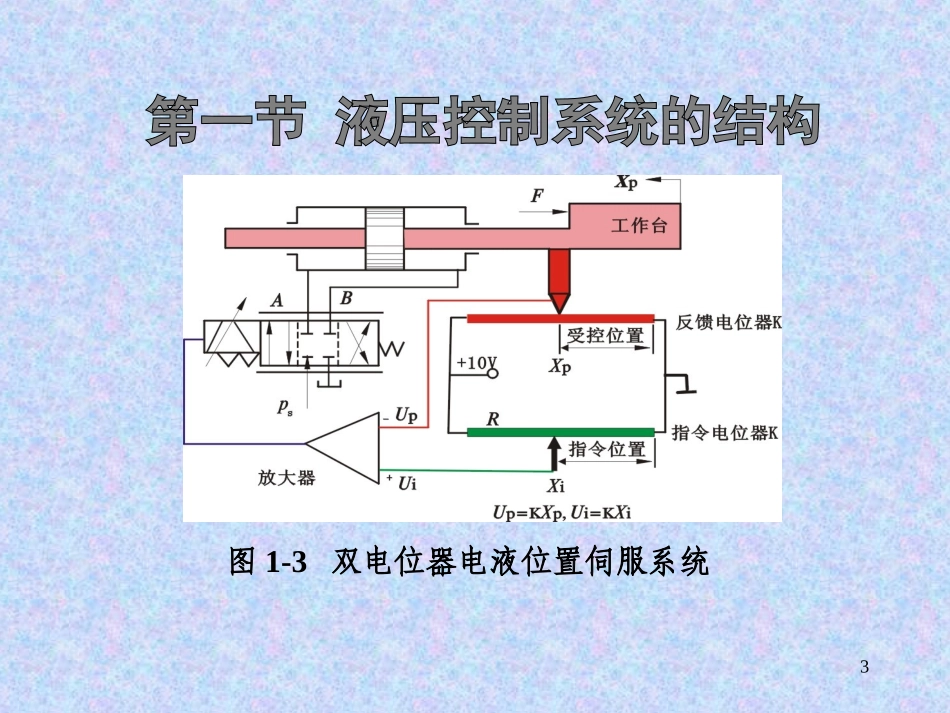
控制相关专业研究生选修课程系统建模方法马宏军东北大学信息学院控制理论与导航技术研究所2013年3月逸夫楼203第十章液压控制系统建模方法第十章液压控制系统建模方法3图1-3双电位器电液位置伺服系统4一、采用电压比较的液压工作台位置控制系统传感器1被控对象传感器2比较元件执行元件放大元件指令元件5控制系统组成:•被控对象•指令元件•比较元件•指令传感器•反馈传感器•动力元件(阀
缸)扰动扰动指令指令电位器电位器反馈电位器伺服阀液压能源液压能源II液压缸电放大KaIIUiE--电压比较UPKaKa被控工作台XXPP工作台工作台指令位移Xi液压动力元件放大元件6二、采用电压比较的电动工作台位置控制系统执行元件放大元件传感器1被控对象传感器2比较元件指令元件7电动力元件扰动扰动指令电位器反馈电位器可控硅电源II电放大KaEEUiE--电压比较UPKaKa被控工作台XXPP工作台工作台指令Xi电机控制系统组成:•被控对象•指令元件•比较元件•指令传感器•反馈传感器•动力元件(可控硅\电机)将液压动力元件(伺服阀、缸)换成电动力元件(可控硅与电动机)8三、采用力比较的液压工作台位置控制系统F1F2F1=Xi*K1F2=Xp*K2指令传感器K1反馈传感器K29比较元件11K1+K2K1+K2力比较力比较XiK1K1指令传感器K2K2反馈传感器xxvvDFF1F1--F2F2伺服阀伺服阀XP21FFF比较方程2211kxFkxFpi力传感器方程F比较结果转换成阀位移10液压动力元件控制框图采用力比较方式,用弹簧作为位移-力传感器,以阀芯作为力比较元件
扰动扰动液压缸1K1+K2DF--力比较KaKa被控工作台XXPP工作台工作台指令XiF1F1F2F2指令传感器K1K1指令传感器反馈传感器K2反馈传感器伺服阀液压能源液压能源xxvv11四、采用直接位置比较的液压工作台位置控