浅谈制动踏板机构设计作者:朱鹏程赵卫晨韦振举覃春好来源:《汽车与驾驶维修(维修版)》2018年第08期制动踏板结构圈2非断开式溜板杆(左】和断开式踏損轩(右]S3塑料支架[左)和金陽支架(右)图4非断开式踏板受力情况團6断开式踏板團了变敲面踏板8踏板支架受力情况图9踏板支架摘要:制动踏板是汽车制动系统的必要零件
除了要满足国标对强度、刚度的要求,还要尽量实现制动踏板的轻量化
本文通过对制动踏板受力情况的分析,并结合分析结果提出了踏板杆、踏板支架等主要部件的設计建议
关键词:制动踏板;受力分析;轻量化中图分类号:U463
5文献标识码:A0引言制动踏板在设计过程中,经常出现输入条件的变更
了解制动踏板的受力情况,可以对输入条件变更带来的影响进行初步评估,使踏板的结构设计更有方向性
除此之外,还可以对最大应力、变形区域进行预判,并与CAE分析结果相比对,判断其分析结果是否具有合理性
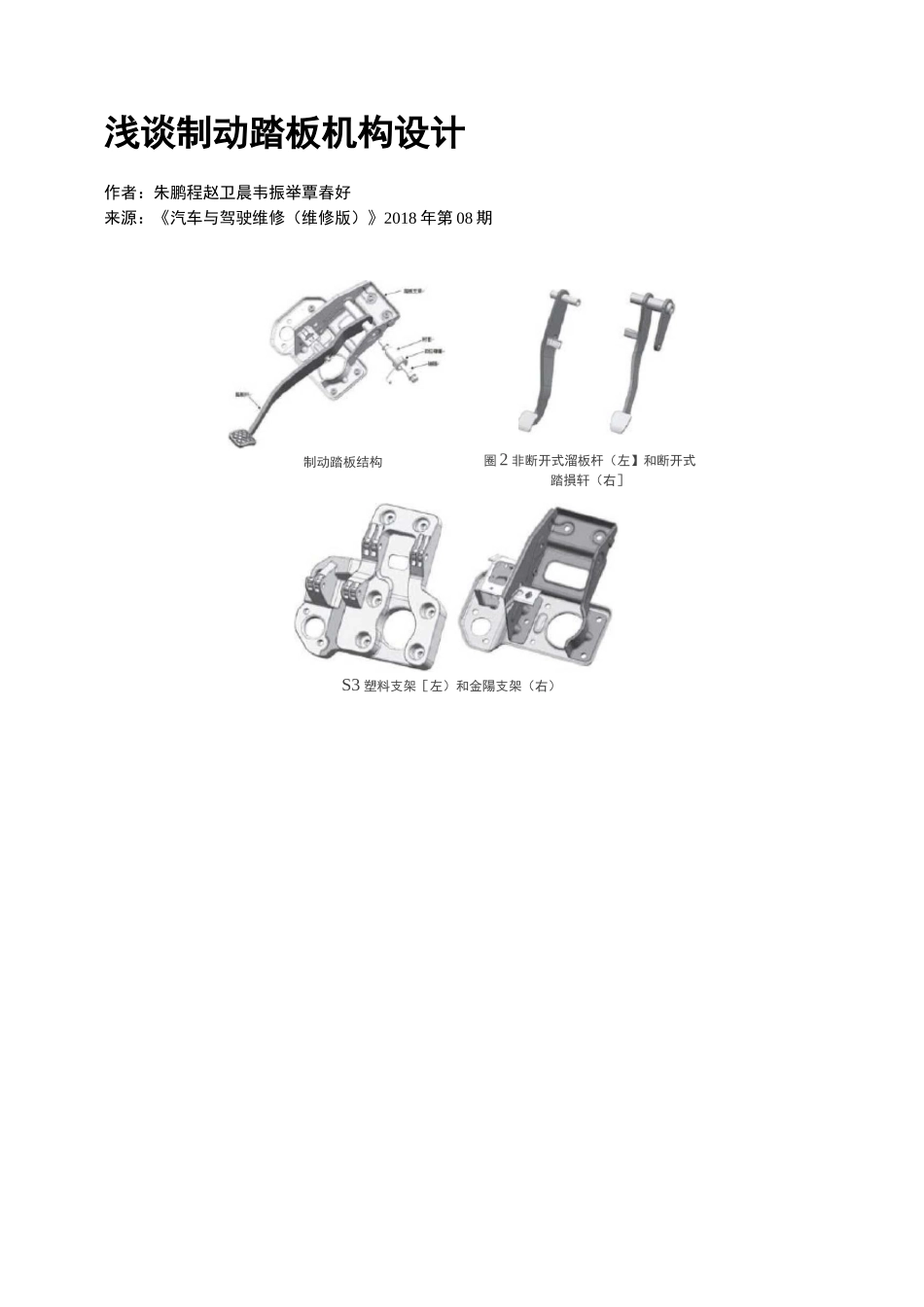
1踏板机构如图1所示,制动踏板主要由踏板杆、踏板支架、轴销、衬套、回位弹簧和衬套等零件组^成O1
1踏板杆踏板杆常见结构有非断开式踏板杆与断开式踏板杆(图2)
其中,断开式踏板的结构主要是为了避让转向系统的中间轴和传动轴等零件;而非断开式踏板杆相对断开式踏板结构更简单,质量更轻
2踏板支架踏板支架根据使用的材料分为塑料踏板支架与金属踏板支架(图3),塑料踏板支架成型精度高,质量小,但成本高
2踏板杆受力情况2
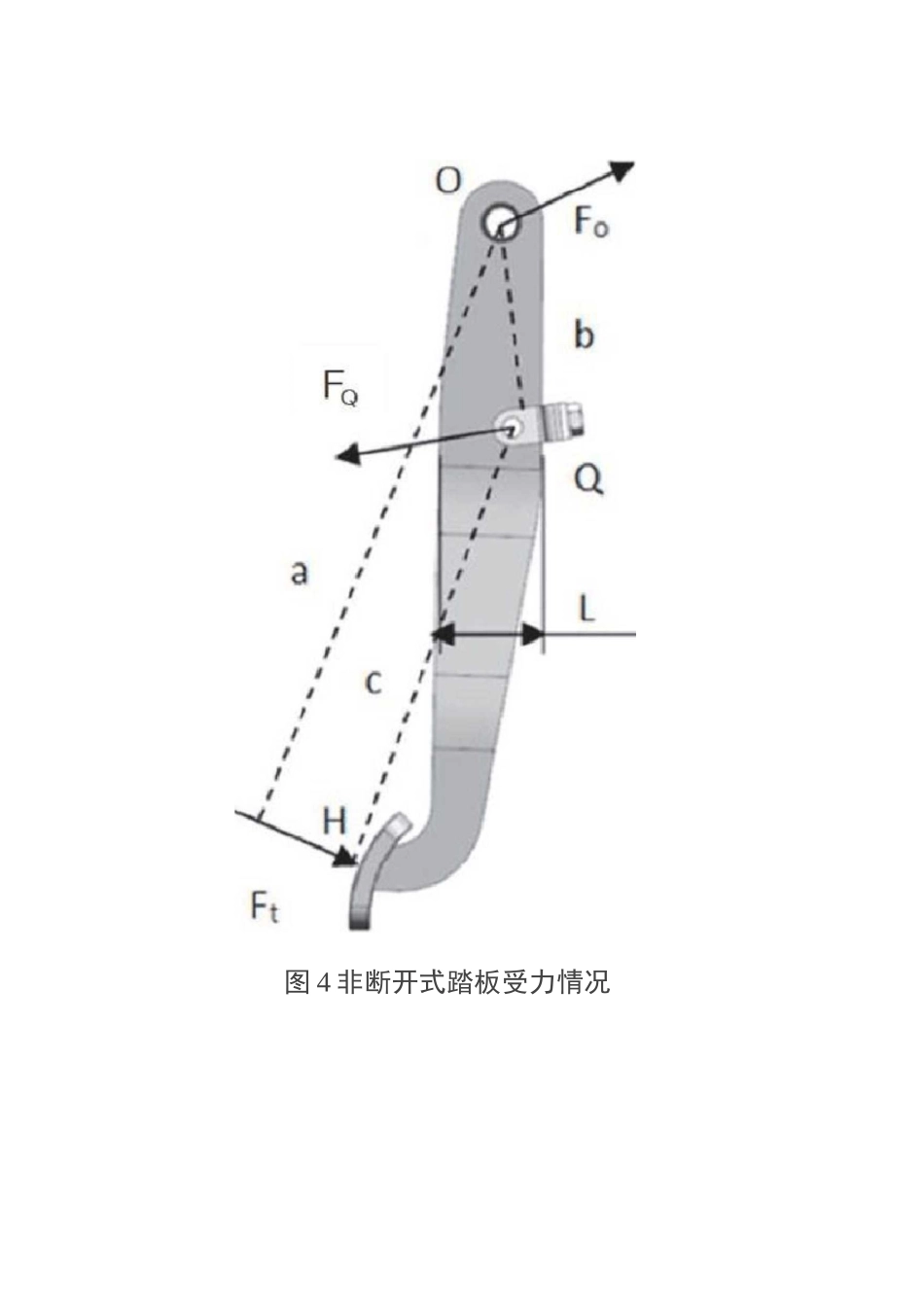
1非断开式踏板杆如图4、图5所示,该踏板杆为非断开式踏板杆,它静止地处于1/2全行程位置上
O点为踏板旋转点,Q为推杆“U”型叉与踏板杆接触点,H点为踏板面中心点
耳为踏板力(假设踏板力过踏板H点,并垂直于踏板面),FQ为助力器推杆对踏板的支持力
FO为踏板支架对踏板杆的作用力
a为输入力臂,b为输出力臂,c为踏板面中心H点到Q点的距离
踏板杠杆比i=a/b,杠杆比是影响踏板感觉的重要因素