湖北理工学院毕业设计(论文)外文文献翻译毕业设计(论文)外文文献翻译题目:教学院:专业名称:学号:湖北理工学院毕业设计(论文)外文文献翻译学生姓名:指导教师:年月日大型空间机械臂设计方案和效应器的比较研究丰飞,刘伊威,刘宏,蔡鹤皋(哈尔滨工业大学机器人系统与技术国家重点实验室,黑龙江哈尔滨150080)摘要:大空间机械臂的末端执行器用来协助处理和操纵大型机械手对轨道的有效载荷
目前,关于末端执行器的研究较少,且现有的末端执行器有一些缺点,如不对耐受能力差和复杂的机械部件
根据端定位误差和的大空间机械臂的残余振动特性,两个基本性能要求的末端执行器包括提出了未对准公差和软捕获能力
末端执行器应满足如下的机械接口错位
在轴向和径向方向和角度错位的错位滚动俯仰和偏航100毫米,100毫米,10°,15°,15°,分别考虑七个末端执行器的方案和的错位公差和软捕获能力的初步分析
三个手指的三瓣的末端执行器与钢丝绳圈套的末端七方案最可行的方案,并进行了详细的设计
错位公差和软捕获的能力进行验证和评价,通过对微重力模拟装置实验在亚当斯软件的动态分析
结果表明,这两个方案的失调容差能力满足要求
在轴向和径向方向和角度偏差的翻译错位公差在辊,钢丝绳的俯仰和偏航网罗末端为30mm,15mm,6,3和3°°大于三指三瓣末端执行器,和钢丝绳的末端执行器的接触力被减小,比这三个手指的三瓣末端执行器
端部执行器方案和研究方法有利于发展大空间机械臂末端执行器和空间对接机构
关键词:末端执行器,大空间机械臂,机制,软捕获,失调容差,分层最优控制,计算机科学控制1引言湖北理工学院毕业设计(论文)外文文献翻译大空间机械手是一个重要的在轨服务的工具
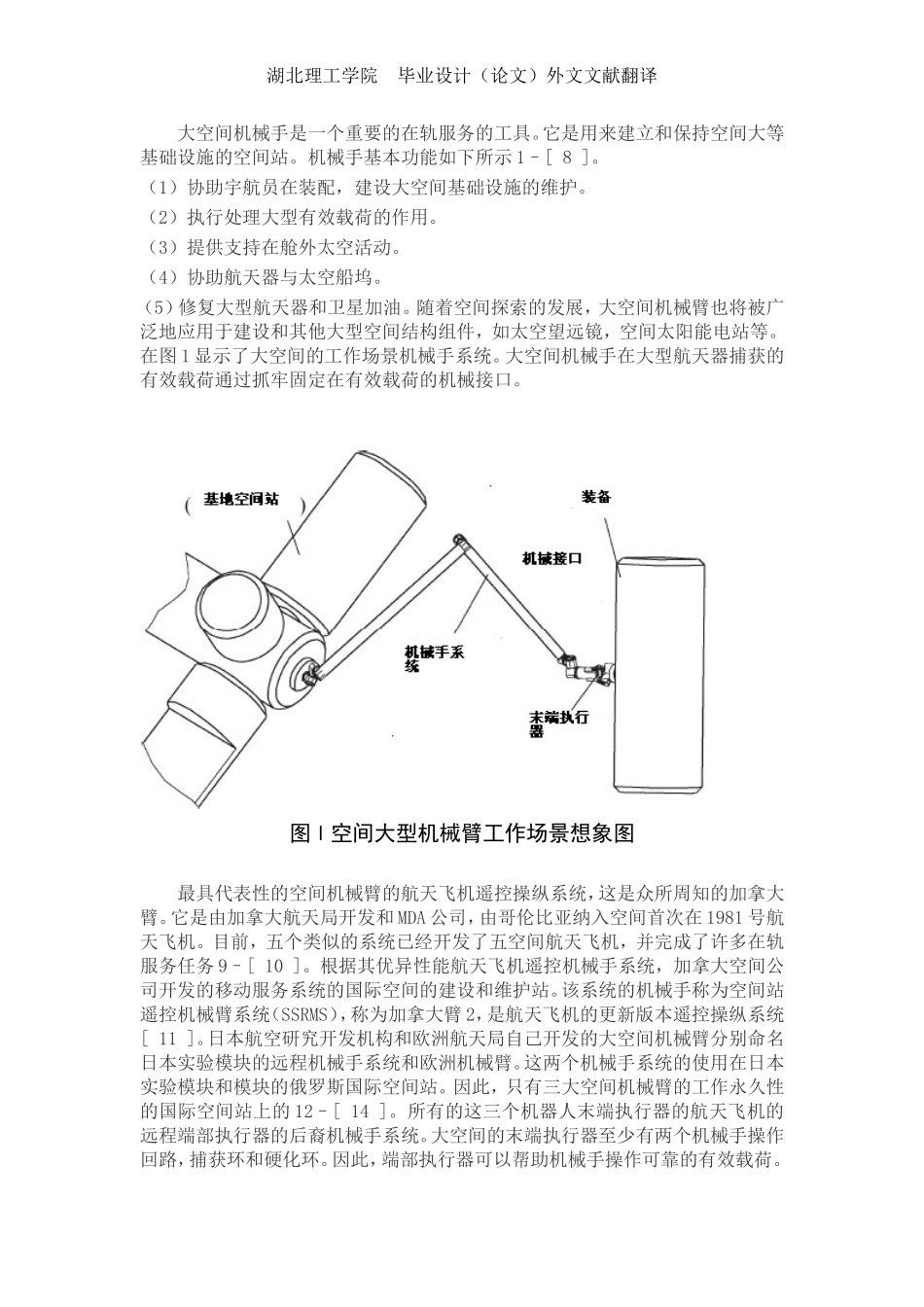
它是用来建立和保持空间大等基础设施的空间站
机械手基本功能如下所示1–[8]
(1)协助宇航员在装配,建设大空间基础设施的维护
(2)执行处理大型有效载荷的作用