1第四章常用的第四章常用的无约束优化方法无约束优化方法4
1坐标轮换法4
2鲍威尔(Powell)法4
6DFP变尺度法4
7BFGS变尺度法无约束优化方法的评价准则及选用2若存在则称X*点为无约束最优点,F(X)为无约束最优值
直接搜索法:坐标轮换法、鲍威尔法方法间接法:梯度法、牛顿法、变尺度法直接搜索法:只需进行函数值的计算与比较来确定迭代方向和步长间接法:利用函数的一阶或二阶偏导数矩阵来确定迭代方向和步长**,min()()XFXFX使对于无约束优化问题:12min
TnnFXXxxxR34
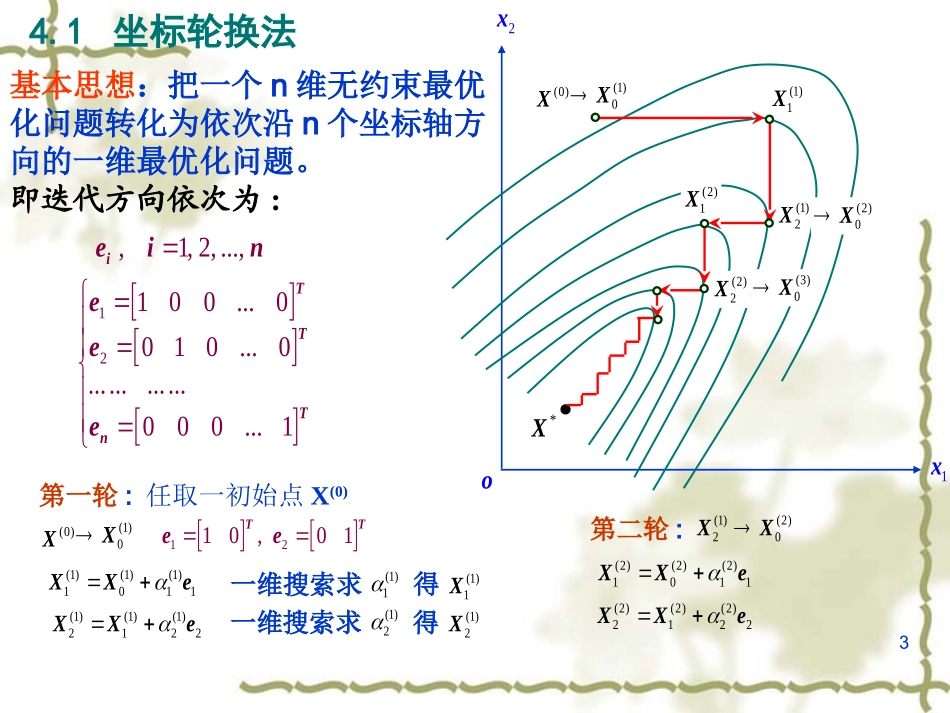
1坐标轮换法2xo1x*X基本思想:把一个n维无约束最优化问题转化为依次沿n个坐标轴方向的一维最优化问题
即迭代方向依次为:,1,2,
,iein12100
1TTTneee(0)X(1)0X(1)1X(1)2X(2)0X(2)1X(2)2X(3)0X第一轮:任取一初始点X(0)(0)X(1)0X1210,01TTee(1)(1)(1)1011XXe(1)1一维搜索求得(1)1X(1)(1)(1)2122XXe(1)2一维搜索求得(1)2X第二轮:(1)(2)20XX(2)(2)(2)1011XXe(2)(2)(2)2122XXe4终止准则:()()0kknXX*()knXX2xo1x*X(0)X(1)0X(1)1X(1)2X(2)0X(2)1X(2)2X(3)0X上式点距准则中的两点应是一轮迭代的始点与终点利用一维优化方法确定沿该方向上具有最小目标函数值的步长,即:min{F(X(k)+αS(k))}=F(X(k)+α(k)S(k))迭代步长α的确定:5坐标轮换法的流程图()ki