DV-SC/07
2004©FestoDidacticGmbH&Co
KG2004ForCOSIMIRMELFA-BASIC4DV-SC/07
2004©FestoDidacticGmbH&Co
KG2004DV-SC/07
2004©FestoDidacticGmbH&Co
KG2004•第1单元MELFA-BASIC-IV位置及移动指令:1
MOV(移动)2
SPD(速度)3
DLY(延时)4
MVS(直线移动)5
MVR(MoveR)6
MVR2(MoveR2)MELFA-BASIC-IV抓手指令:7
HCLOSE(抓手关闭)8
HOPEN(抓手打开)MELFA-BASIC-IV程序指令:9
END(结束)10
HLT(Halt)DV-SC/07
2004©FestoDidacticGmbH&Co
KG20041
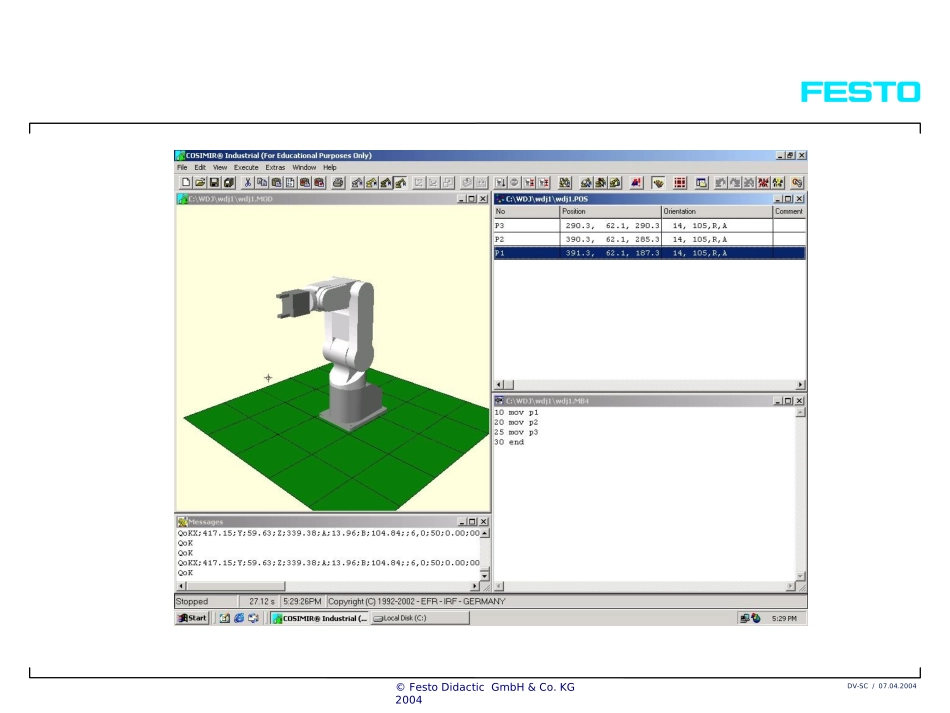
MOV(移动)功能描述:将机械手移动到指定位置(明确插补)Sampleprogram:程序举例5'Startofthecourse(说明)10MOVp1(移动到位置1)20MOVp2(移动到位置2)30END(程序结束)DV-SC/07
2004©FestoDidacticGmbH&Co
KG2004机械手的移动全轴同时启动全轴同时停止移动指令DV-SC/07
2004©FestoDidacticGmbH&Co
KG2004移动指令MOV(MOVE)关节插补动作移动宽松的曲线DV-SC/07
2004©FestoDidacticGmbH&Co
KG2004MVS(直线移动)功能描述:从当前位置到目标位置执行直线插补运动
程序举例:10MOVP120DLY230SPDVSLOW40MVSP250MOVP1DV-SC/07
2004©FestoDidacticGmbH&Co
KG2004移动指令MVS(M