多源信息融合---UKF算法UKF算法滤波性能分析高海南3110038011一、仿真问题描述考虑一个在二维平面x-y内运动的质点M,其在某一时刻k的位置、速度和加速度可用矢量表示
假设M在水平方向(x)作近似匀加速直线运动,垂直方向(y)上亦作近似匀加速直线运动
两方向上运动具有加性系统噪声,则在笛卡尔坐标系下该质点的运动状态方程为其中假设一坐标位置为(0,0)的雷达对M进行测距和测角,实际测量中雷达具有加性测量噪声,则在传感器极坐标系下,观测方程为显然在笛卡尔坐标系下,该模型运动观测方程为非线性的
我们根据雷达测量值使用UKF算法对目标进行跟踪,并与EKF算法结果进行比较
二、问题分析1
UKF滤波跟踪1多源信息融合---UKF算法对于非线性系统,设具有协方差阵,具有协方差阵
ukf算法步骤如下:(1)计算点,依据和生成2n+1个点,
在UT变换时,取尺度参数α=0
01,κ=0,β=2
(2)计算点,即(3)计算点通过量测方程对的传播,即(4)计算输出的一步提前预测,即(5)获得新的量测后,进行滤波更新:2
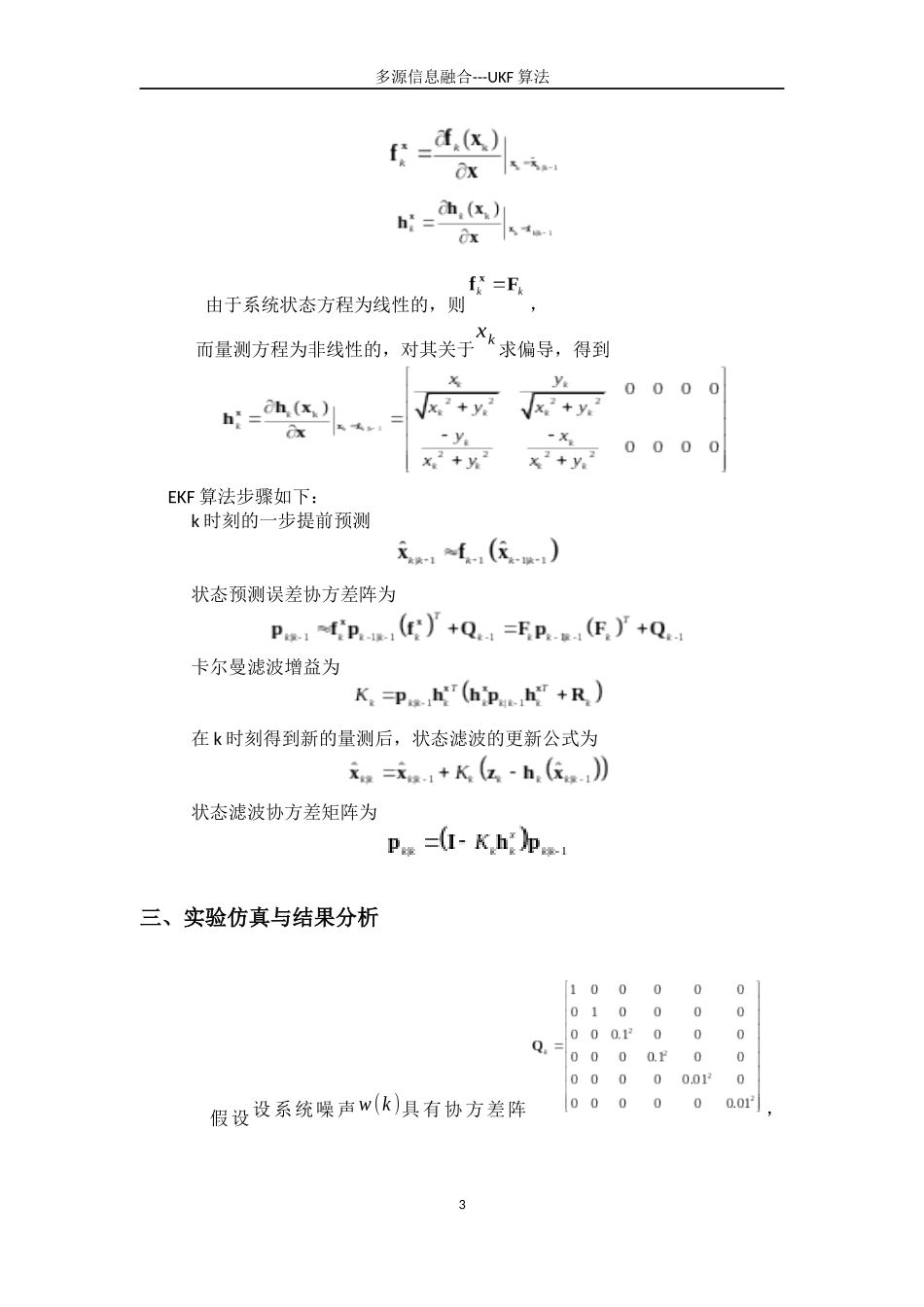
扩展卡尔曼滤波算法分析对于讨论的非线性系统,由于状态方程为线性的,定义2多源信息融合---UKF算法由于系统状态方程为线性的,则,而量测方程为非线性的,对其关于xk求偏导,得到EKF算法步骤如下:k时刻的一步提前预测状态预测误差协方差阵为卡尔曼滤波增益为在k时刻得到新的量测后,状态滤波的更新公式为状态滤波协方差矩阵为三、实验仿真与结果分析假设设系统噪声w(k)具有协方差阵,3多源信息融合---UKF算法v(k)具有协方差阵Rk=[52000
012],二者不相关
观测次数N=50,采样时间为t=0
则生成的运动轨迹如图1所示
图1M的轨迹图(1)t=0
5时UKF和EKF滤波结果比较我们将UKF和EKF滤波算法进行比较,如图2所示
为了方便对比,我们将