第4期机械设计与制造型
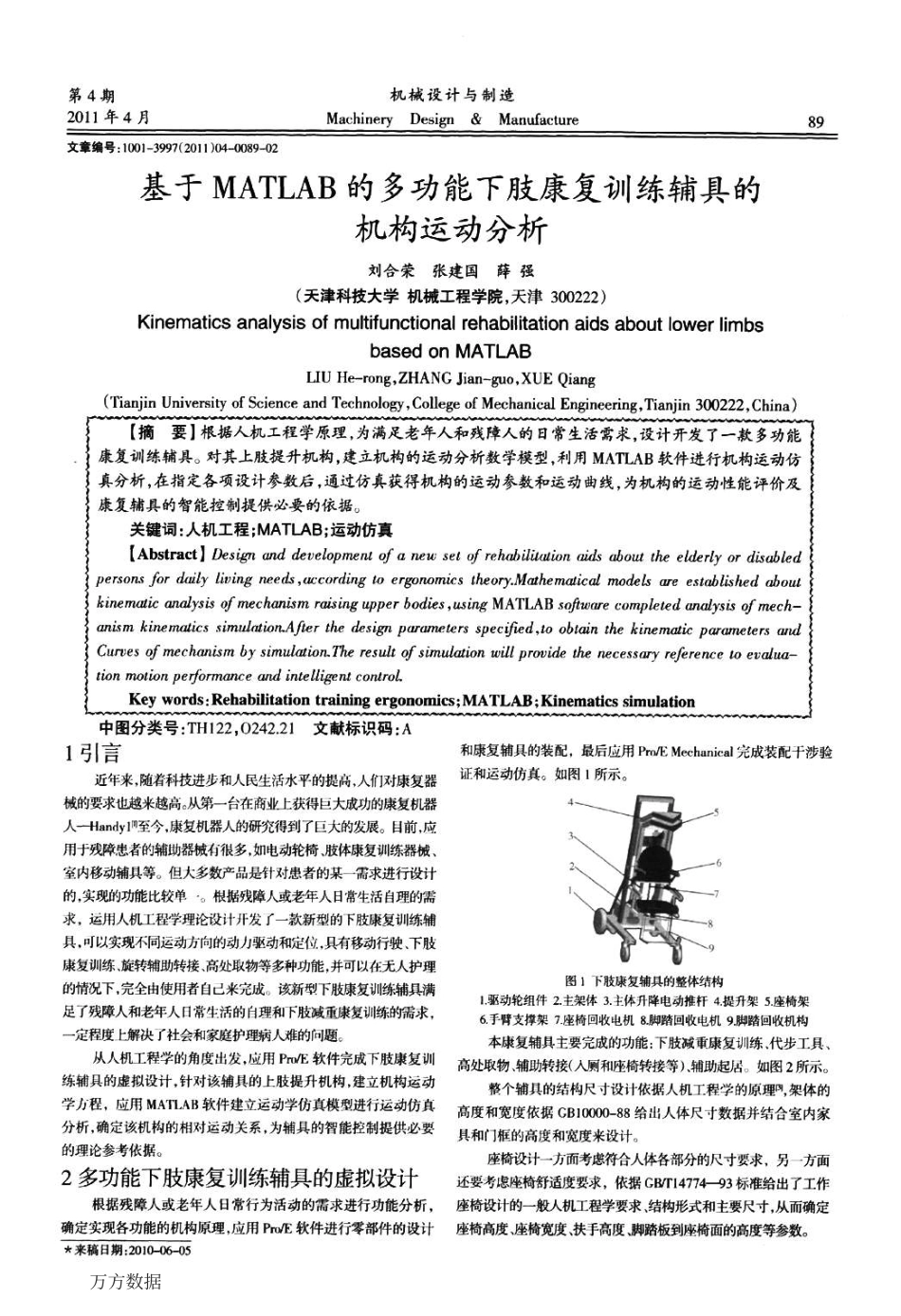
i●■{:1∞l一3997(201I)㈣啦基于MATLAB的多功能下肢康复训练辅具的机构运动分析刘合荣张建国薛强(天津科技大学机械工程学院,天津300222)KinematicsanalysisofmultifunctionaIrehabilRationaidsaboutlowerlimbsbasedonMATLA8iJuHPmng,ZHANGJ一"o.XUEQi,“g(TianjinUniversityofScleneeandTeeh.ology,CollegeofMechaai"-adEnsnaring.Tianjin300222,China)【摘要】根据人机工程学原理,曲满足老年人和残障人的日常生活需求.设计开发了一款;功能康复训练辅具
对其上胜提升机构,建立机构的运动分析数学模型,利用MATLAB软件进行机构运动仿真分析,在指定各项设计参数后,通过仿真获得机构的连动参数和运动曲线,为机构的运动性能评价度康复辅具的智能控制提供廿普的依据
关键词:人机工程;MATLAB;运动仿真IAbstract】肌5‘鲁,I眦d如"ez叩船Ⅲ一⋯s“矿r_'ludillitationaids曲㈣theIdefly
rdisabledP⋯Ⅲfordull,living肿r士,c越'c,,rdiogmergo肋mwsIkom舭k删"d脚dels删establLshedaboⅢkiwmaticanalysisofⅢc^⋯raisingupperbodies,∞‘wMATLABs碰⋯¨q,*kdⅢ-odysuof—h⋯kimr,“icssimMatio,LAflerthedesignp—tersspeulfmd,mobtainthekimrnazlc⋯f⋯ulCu月esof榭ch⋯bysimulation.Them