实用标准文案精彩文档实验二MATLAB系统模型建立和动态特性分析实验一、实验目的1.掌握如何使用MALAB进行系统模型的建立;2.学习利用MALAB命令得阶跃响应曲线,分析系统动态特性;3.利用MALAB求阶跃响应的性能指标
二、实验仪器计算机三、实验内容2
1控制系统的模型控制系统的表示可用三种模型:传递函数、零极点增益、状态空间
每一种模型又有连续与离散之分
为分析系统方便有时需要在三种模型间转换
MATLAB提供了各种命令,使我们可以很方便的完成这些工作,下面以连续系统为例简要说明有关命令
1模型与表示式1、传递函数模型11101110
mmmmnnnnbsbsbsbGsasasasa在MATLAB中直接用矢量组表示传递函数的分子、分母多项式系数,即:num=[bmbm-1⋯b0];表示传递函数的分子多项式系数den=[anan-1⋯a0];表示传递函数的分母多项式系数sys=tf(num,den)tf命令将sys变量表示成传递函数模型
2、零极点增益模型1212()()
()()()()
()mnszszszGskspspsp在MATLAB中用z、p、k矢量组分别表示系统的零点、极点和增益,即:z=[z1z2⋯⋯zm];p=[p1p2⋯⋯pn];k=[k];sys=zpk(z,p,k)zpk命令将sys变量表示成零极点增益模型
3、状态空间模型x=ax+buy=cx+du在MATLAB中用(a、b、c、d)矩阵组表示,然后sys=ss(a,b,c,d)ss命令将sys变量表示成状态空间模型
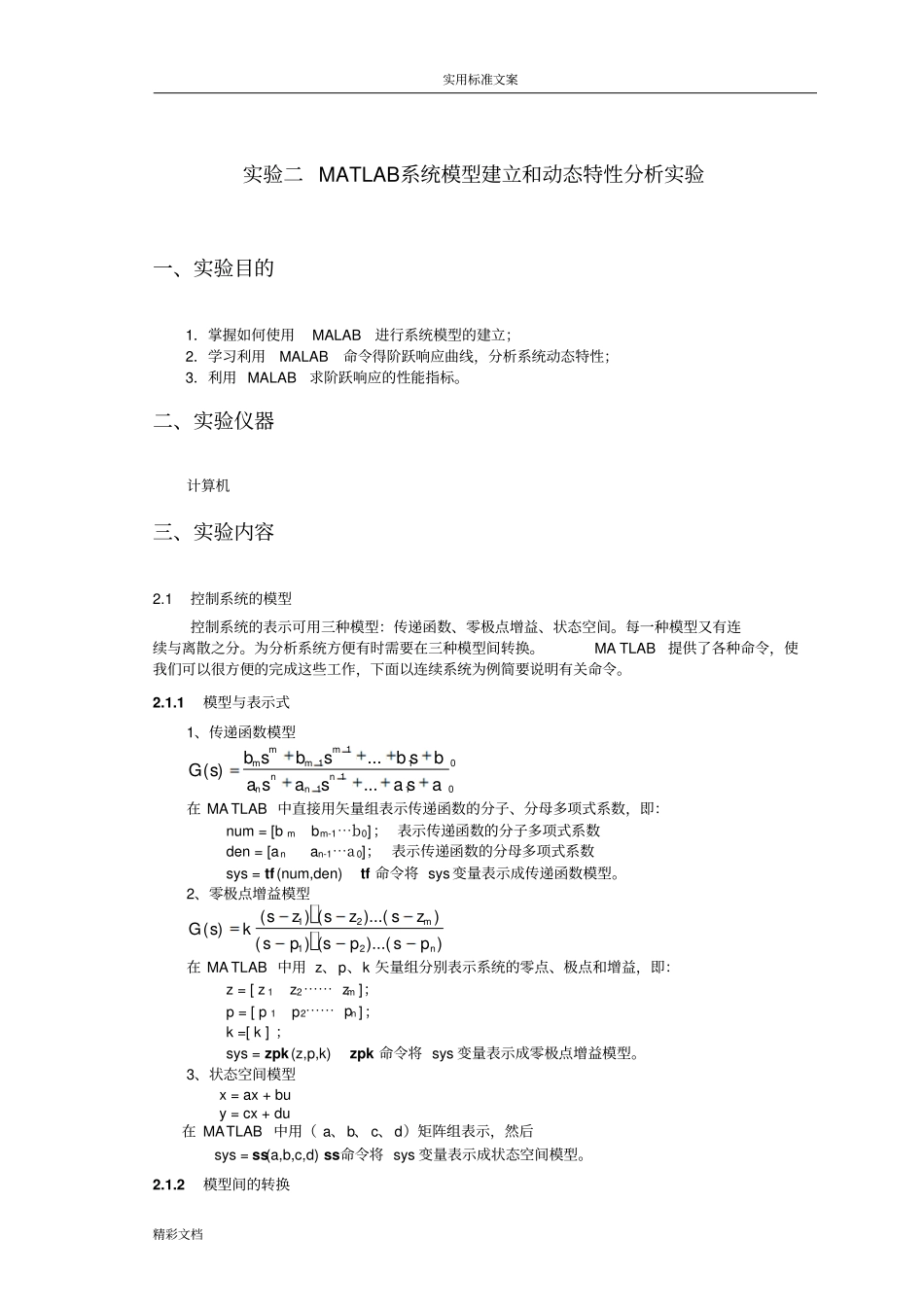
2模型间的转换实用标准文案精彩文档在MATLAB中进行模型间转换的命令有:ss2tf、ss2zp、tf2ss、tf2zp、zp2tf、zp2ss它们之间的作用可由下面的示意图表示:ss2tftf2sszp2tftf2zpzp2ssss2zp2