Vertical(Zn)(4
1无人机避障系统模型1•无人机位置模型就本质而言,无人机避障是对其位置进行控制的过程
因此首先需要建立起能够反应无人机所处位置的完善系统
此外,由于无人机运行中需要一定的空间体积,而且在改变飞行状态时也需要考虑其姿态的变化,故而也有必要对其进行姿态控制
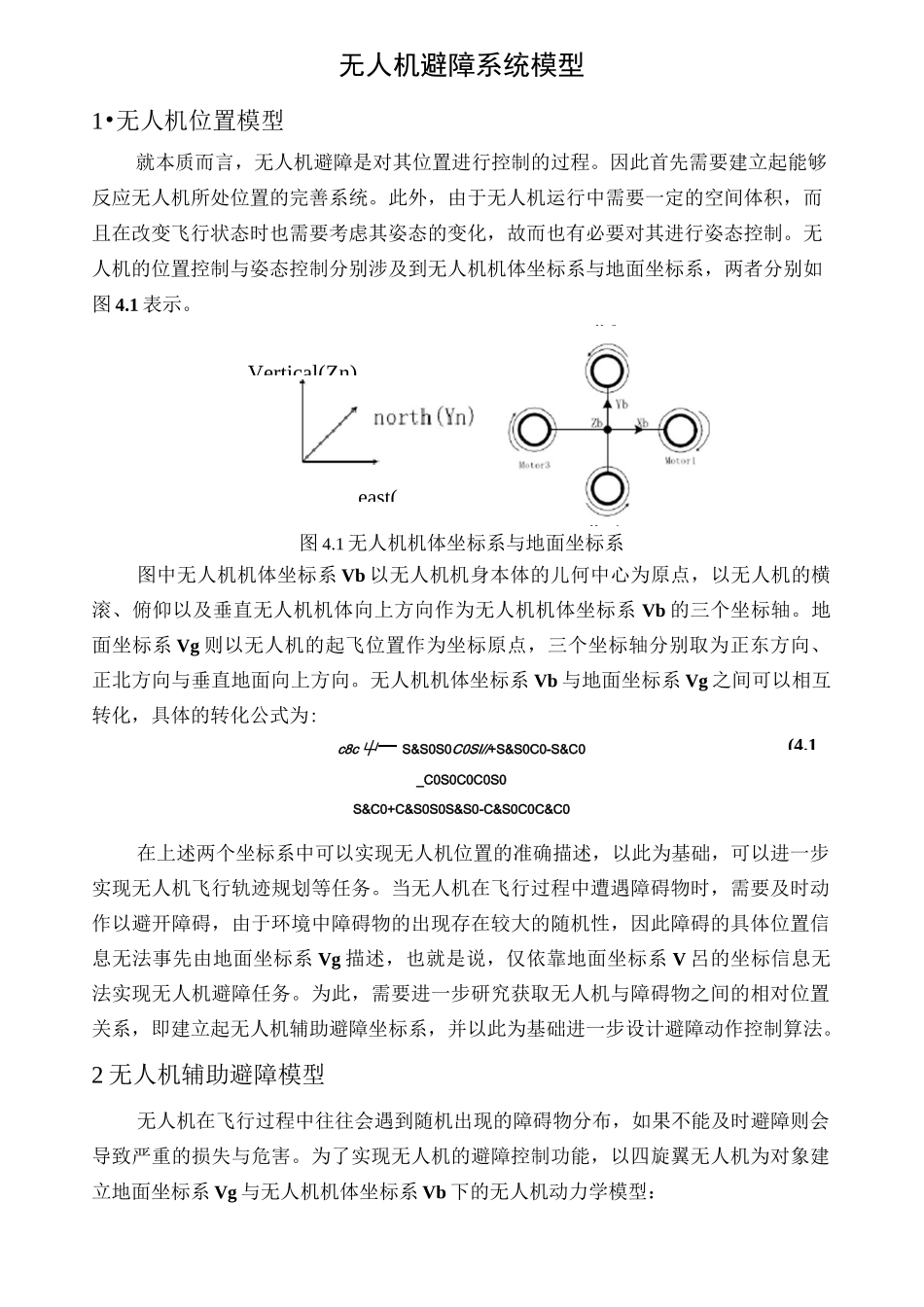
无人机的位置控制与姿态控制分别涉及到无人机机体坐标系与地面坐标系,两者分别如图4
1无人机机体坐标系与地面坐标系图中无人机机体坐标系Vb以无人机机身本体的儿何中心为原点,以无人机的横滚、俯仰以及垂直无人机机体向上方向作为无人机机体坐标系Vb的三个坐标轴
地面坐标系Vg则以无人机的起飞位置作为坐标原点,三个坐标轴分别取为正东方向、正北方向与垂直地面向上方向
无人机机体坐标系Vb与地面坐标系Vg之间可以相互转化,具体的转化公式为:c8c屮一S&S0S0C0SI//+S&S0C0-S&C0_C0S0C0C0S0S&C0+C&S0S0S&S0-C&S0C0C&C0在上述两个坐标系中可以实现无人机位置的准确描述,以此为基础,可以进一步实现无人机飞行轨迹规划等任务
当无人机在飞行过程中遭遇障碍物时,需要及时动作以避开障碍,由于环境中障碍物的出现存在较大的随机性,因此障碍的具体位置信息无法事先由地面坐标系Vg描述,也就是说,仅依靠地面坐标系V呂的坐标信息无法实现无人机避障任务
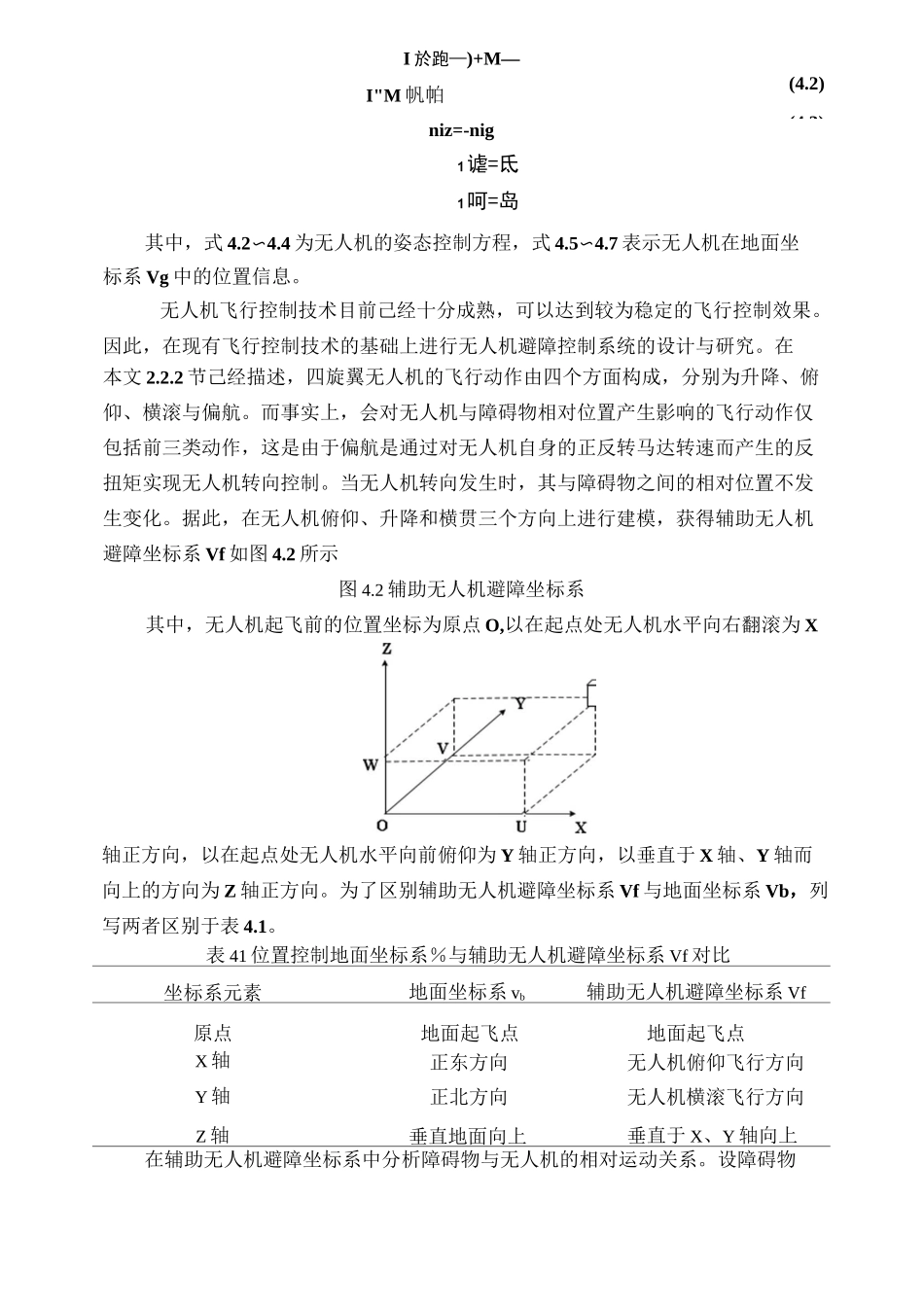
为此,需要进一步研究获取无人机与障碍物之间的相对位置关系,即建立起无人机辅助避障坐标系,并以此为基础进一步设计避障动作控制算法
2无人机辅助避障模型无人机在飞行过程中往往会遇到随机出现的障碍物分布,如果不能及时避障则会导致严重的损失与危害
为了实现无人机的避障控制功能,以四旋翼无人机为对象建立地面坐标系Vg与无人机机体坐标系Vb下的无人机动力学模型:east(MutQMotor-1(4
3)I於跑—)+M—I"M