HarbinInstituteofTechnology课程设计说明书(论文)课程名称:自控控制原理大作业设计题目:控制系统的矫正院系:自动化测试与控制系班级:设计者:学号:指导教师:强盛设计时间:2016
21哈尔滨工业大学题目88
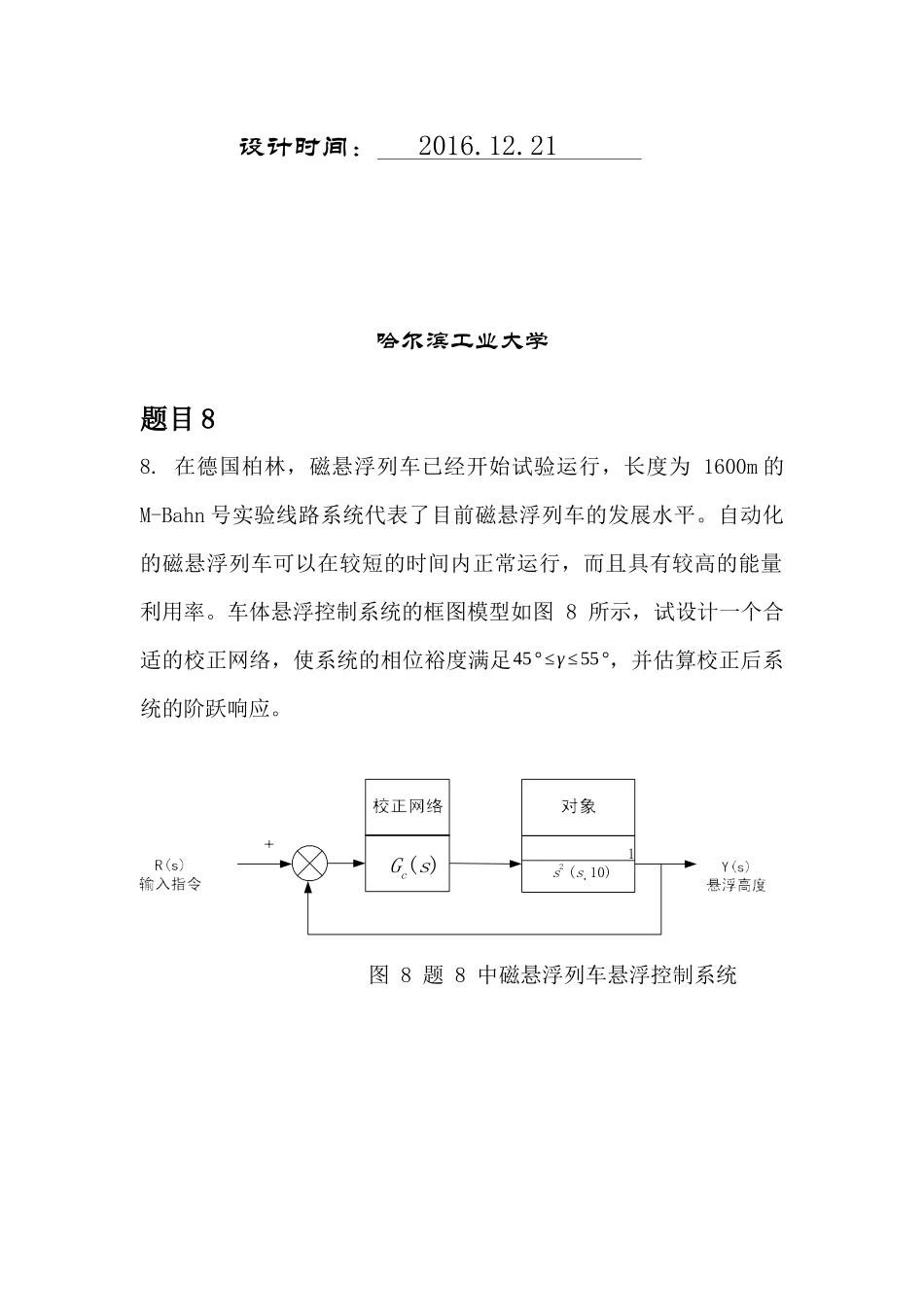
在德国柏林,磁悬浮列车已经开始试验运行,长度为1600m的M-Bahn号实验线路系统代表了目前磁悬浮列车的发展水平
自动化的磁悬浮列车可以在较短的时间内正常运行,而且具有较高的能量利用率
车体悬浮控制系统的框图模型如图8所示,试设计一个合适的校正网络,使系统的相位裕度满足45°≤γ≤55°,并估算校正后系统的阶跃响应
图8题8中磁悬浮列车悬浮控制系统1s2(s10)Gc(s)一、人工设计利用半对数坐标纸手工绘制系统校正前后及校正装置的Bode图,并确定出校正装置的传递函数
验算校正后系统是否满足性能指标要求
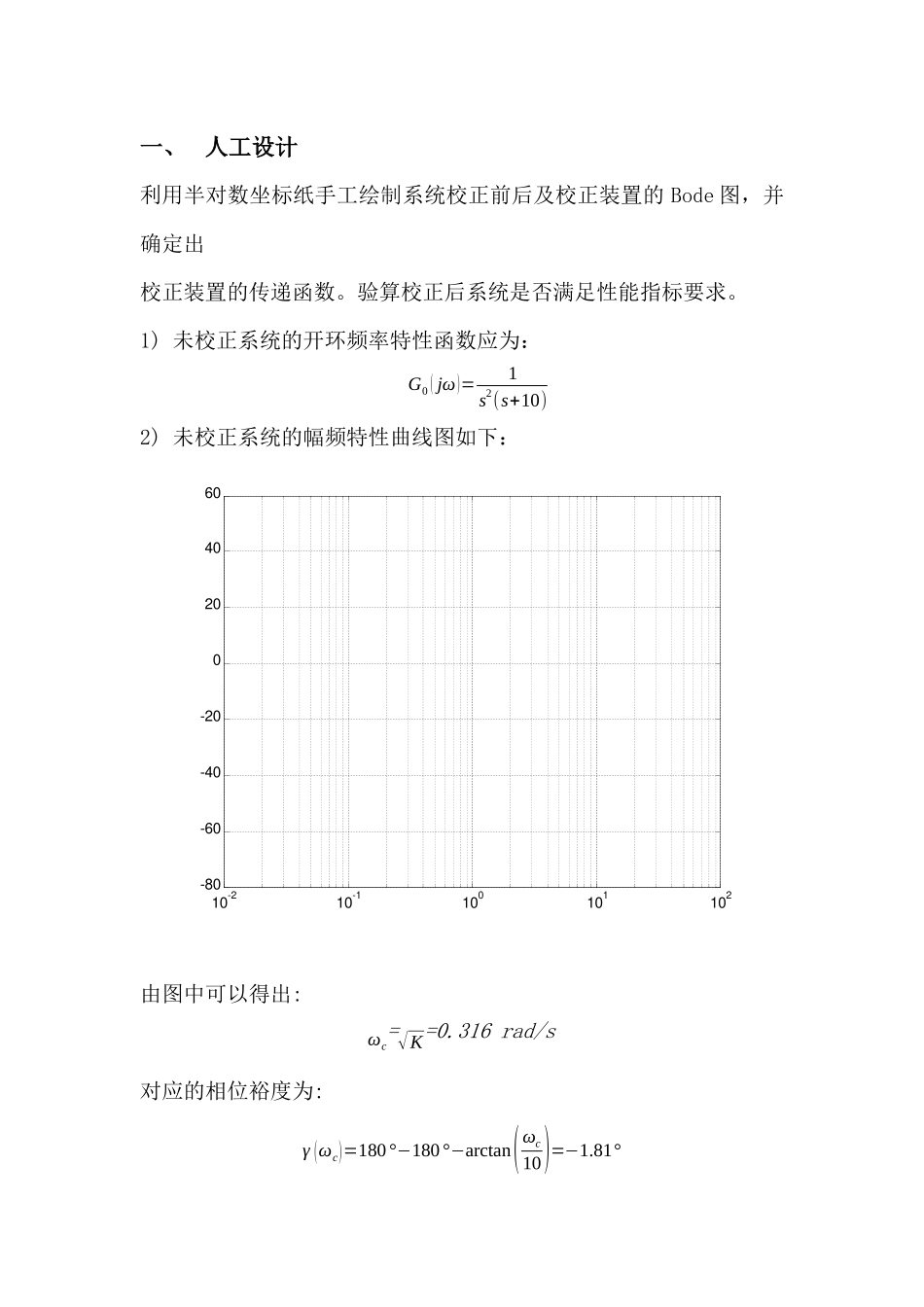
1)未校正系统的开环频率特性函数应为:G0(jω)=1s2(s+10)2)未校正系统的幅频特性曲线图如下:10-210-1100101102-80-60-40-200204060由图中可以得出:ωc=√K=0
316rad/s对应的相位裕度为:γ(ωc)=180°−180°−arctan(ωc10)=−1
81°3)超前校正提供∅(m)=50°4)a−1a+1=sin50°解得a=7
55)−10lga=−8
75dB,得到ωm=¿0
523rad/s6)1T=√aωm=¿1
43rad/s1aT=¿0
19rad/s7)GC(s)=1+5
7s二、计算机辅助设计利用MATLAB语言对系统进行辅助设计、仿真和调试g=tf(1,[11000]);gc=tf([5
31],[0
71]);ge=tf([5
31],conv([0
71],[11000]));bode(g,gc,ge);gridlegend('uncompen