下面从广义胡克定理公式出发,用应变能的概念建立常见的各向异性弹性体的应力和应变关系
完全各向异性弹性体根据格林公式和广义胡克定律,有;对于上式,如果对切应变xy求偏导数,有
同理,有;对于上式,如果对正应变x求偏导数,有
因此,C14=C41
对于其它的弹性常数可以作同样的分析,则Cmn=Cnm上述结论证明完全各向异性弹性体只有21个弹性常数
其本构方程为2.具有一个弹性对称面的各向异性弹性体如果弹性体内每一点都存在这样一个平面,和该面对称的方向具有相同的弹性性质,则称该平面为物体的弹性对称面
垂直于弹性对称面的方向称为物体的弹性主方向
若设yz为弹性对称面,则x轴为弹性主方向
以下根据完全各向异性弹性体本构方程,推导具有一个弹性对称面的各向异性弹性体的本构方程
将x轴绕动z轴转动π角度,成为新的Ox'y'z'坐标系
新旧坐标系之间的关系为xyzx'l1=-1m1=0n1=0y'l2=-1m2=0n2=0z'l3=-1m3=0n3=0根据弹性对称性质
关于x轴对称的应力和应变分量在坐标系变换时保持不变,而关于x轴反对称的应力和应变分量在坐标系变换时取负值
所以x'=x,y'=y,z'=z,x'y'=xy,y'z'=yz,z'x'=zxx'=x,y'=y,z'=z,x'y'=xy,y'z'=yz,z'x'=zx根据弹性主方向性质,作这一坐标变换时,本构关系将保持不变
根据完全各向异性弹性体的本构方程,将上述关系式代入广义胡克定理,可得将上式与广义胡克定理相比较,要使变换后的应力和应变关系保持不变,则必有C14=C16=C24=C26=C34=C36=C54=C56=0这样,对于具有一个弹性对称面的弹性体,其弹性常数由21个将减少为13个
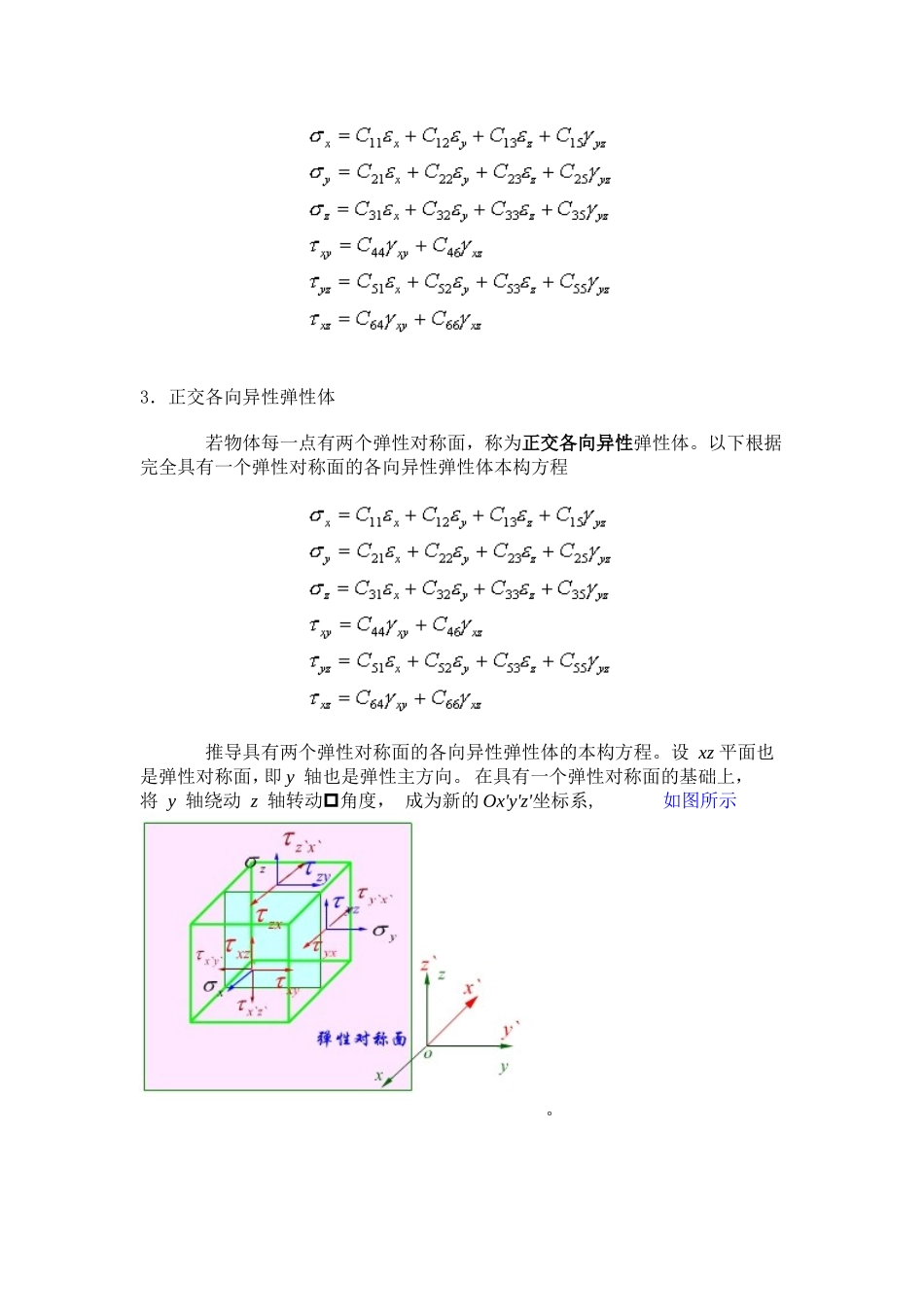
具有一个弹性对称面的弹性体的应力应变关系为3.正交各向异性弹性体若物体每一点有两个弹