后继函数与极限环的稳定性1Poineare映射与后继函数设平面系统,,,kdxPxydtPQCdyQxydt(1)k为足够大的正数,并设是系统(1)的一条闭轨线,其方程为,xxtyytxt与yt是周期为T的函数
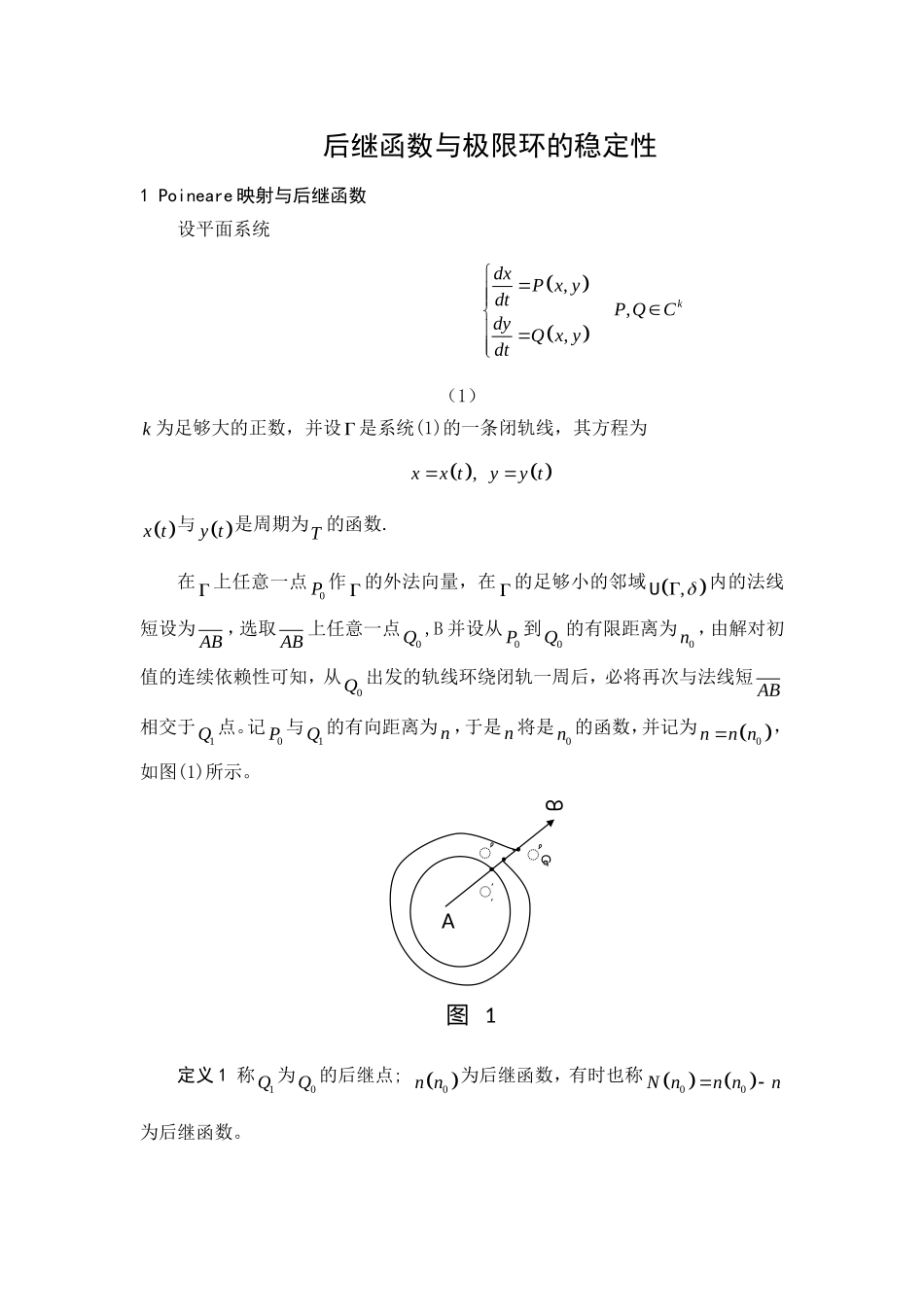
在上任意一点0P作的外法向量,在的足够小的邻域,U内的法线短设为AB,选取AB上任意一点0Q,B并设从0P到0Q的有限距离为0n,由解对初值的连续依赖性可知,从0Q出发的轨线环绕闭轨一周后,必将再次与法线短AB相交于1Q点
记0P与1Q的有向距离为n,于是n将是0n的函数,并记为0nnn,如图(1)所示
Aܲ�ܲ�ܲ�ଵܤ图1定义1称1Q为0Q的后继点;0nn为后继函数,有时也称00Nnnnn为后继函数
当后继函数00Nn时,即0nnn表示过0Q点的轨线是一条闭轨线
通过对后继函数的几何理解,很容易得出下列有关极限环稳定性的重要结论若对法线段AB上任意一点均有000nNn或'00N,则为不稳定的极限环;若000nNn或'00N,则为稳定的极限环;若0000Nnn,则为外稳定而内不稳定的半稳定极限环;若0000Nnn,则为外不稳定而内稳定的半稳定极限环;若00Nn,则为周期环
根据后继函数0Nn的零点个数,可以定义极限环的重数定义2若'k-1000=0,00kNNNN则称为k重极限环
特别地,1k称为单重极限环或简单极限环
显然这里的k重极限环对应于后继函数的k重根
通过后继函数0Nn在零点泰勒展开很容易的到这个结论
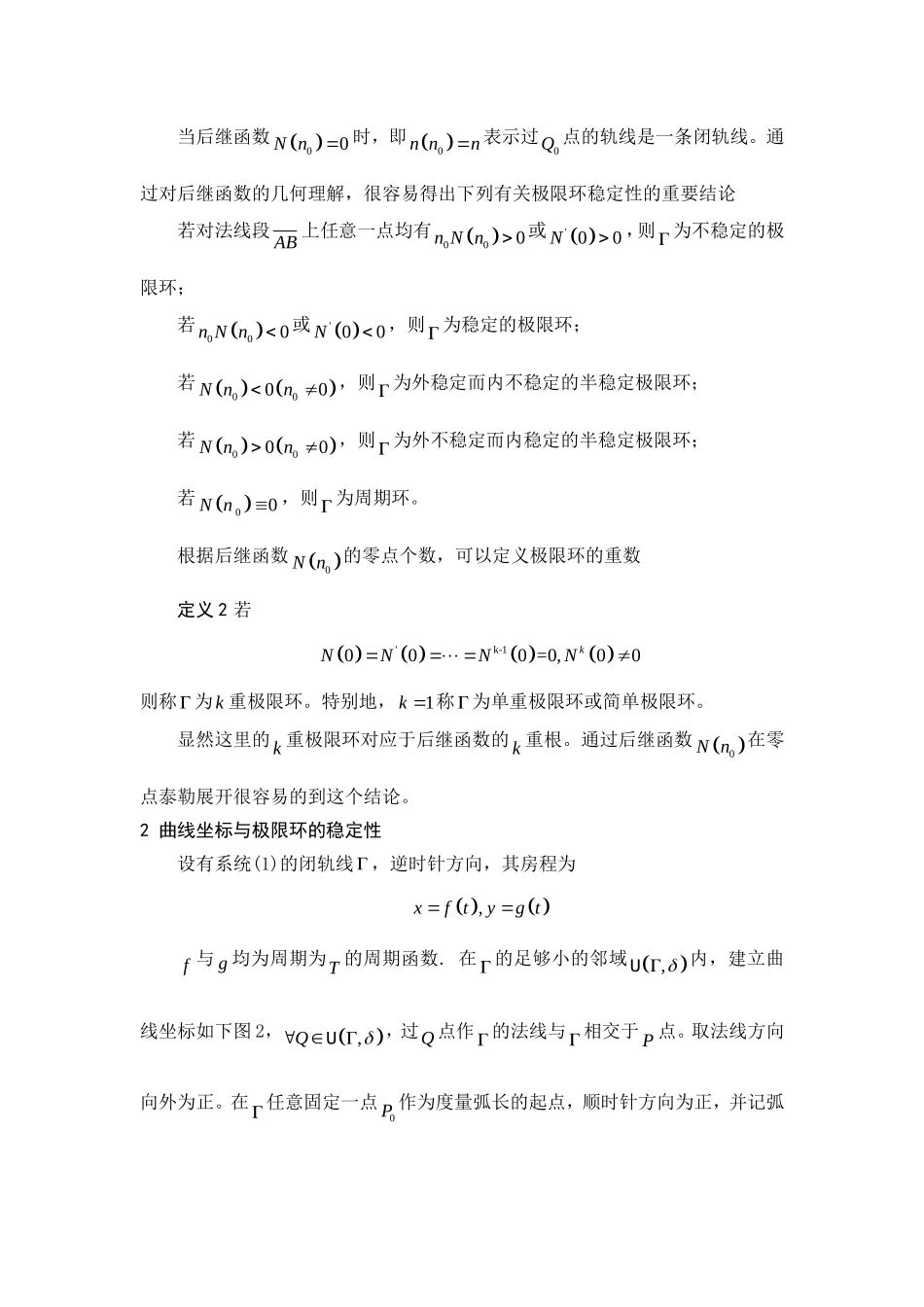
2曲线坐标与极限环的稳定性设有系统(1)的闭轨线,逆时针方向,其房程为,xftygtf与g均为周期为T的周