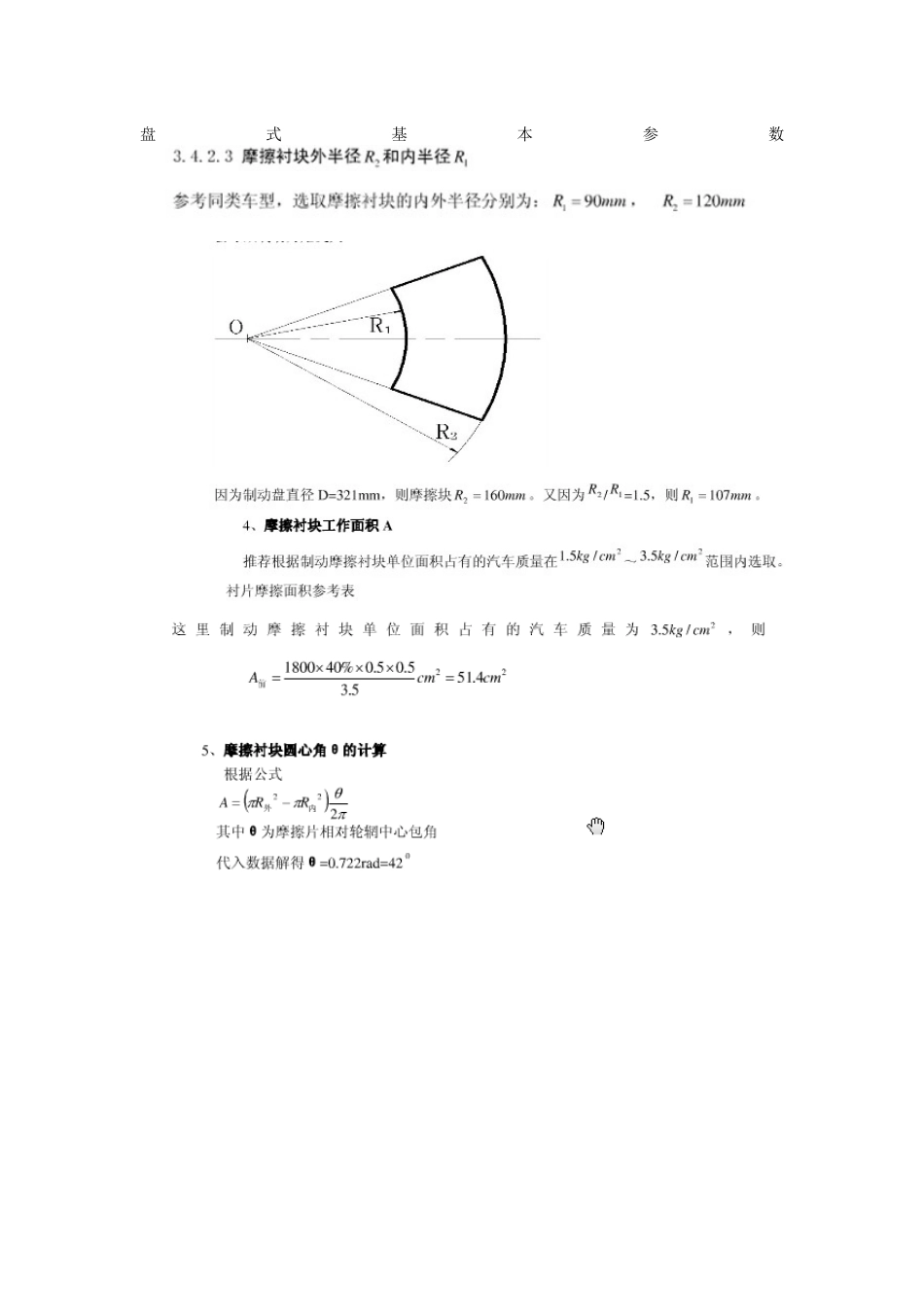
盘式基本参数5
2凸轮张开力的确定及蹄自锁性校核5
1张开力P1与P2的确定在计算鼓式制动器时,必须建立制动蹄对制动鼓的压紧力与所产生的制动力矩之间的关系
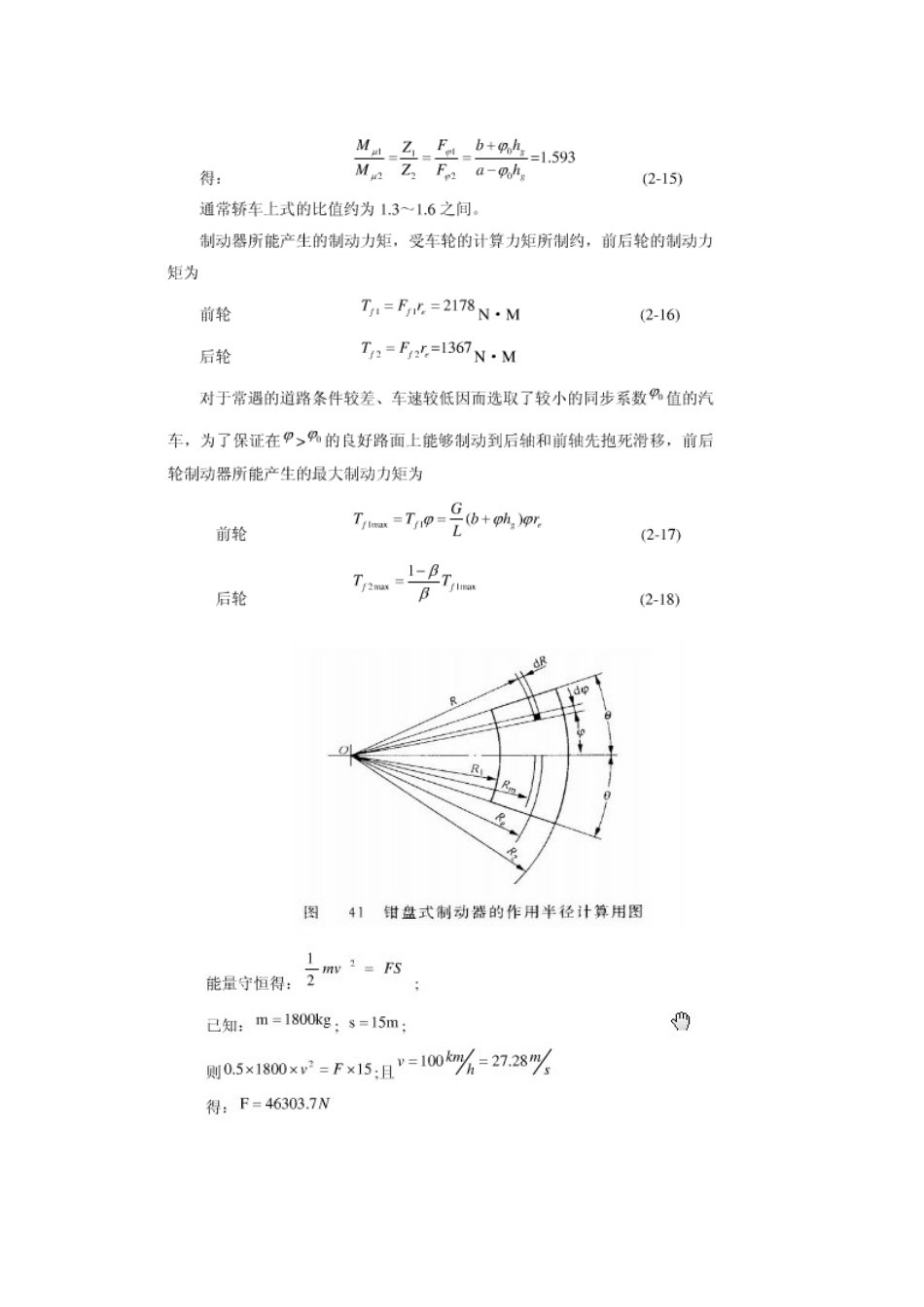
为计算有一个自由度的制动蹄片上的力矩TTf1,在摩擦衬片表面上取一横向单元面积,并使其位于与y1轴的交角为α处,单元面积为bRdα
,其中b为摩擦衬片宽度,R为制动鼓半径,dα为单元面积的包角,如图4-1所示
由制动鼓作用在摩擦衬片单元面积的法向力为:dN=qbRdα=qmaxbRsinαdα(5-1)而摩擦力fdN产生的制动力矩为dTTf=dNfR=qmaxbR2fsinαdα在由α'至α''区段上积分上式,得TTf=qmaxbR2f(cos{α'−cos{α¿'')¿(5-2)当法向压力均匀分布时,dN=qpbRdαTTf=qpbR2f(α''−α')(5-3)由式(46)和式(47)可求出不均匀系数Δ=(α''−α')/(cos{α'−cos{α¿'')¿式(46)和式(47)给出的由压力计算制动力矩的方法,但在实际计算中采用由张开力P计算制动力矩TTf1的方法则更为方便
增势蹄产生的制动力矩TTf1可表达如下:TTf1=fN1ρ1(5-4)式中N1——单元法向力的合力;ρ1——摩擦力fN1的作用半径(见图5-3)
如果已知制动蹄的几何参数和法向压力的大小,便可用式(17—46)算出蹄的制动力矩
为了求得力N1与张开力P1的关系式,写出制动蹄上力的平衡方程式:P1cosα0+S1x−N1(cosδ1+fsinδ1)=0P1a−S1xC'+fρ1N1=0(5-5)式中δ1——x1轴与力N1的作用线之间的夹角;S1x——支承反力在x1轴上的投影
解式(49)