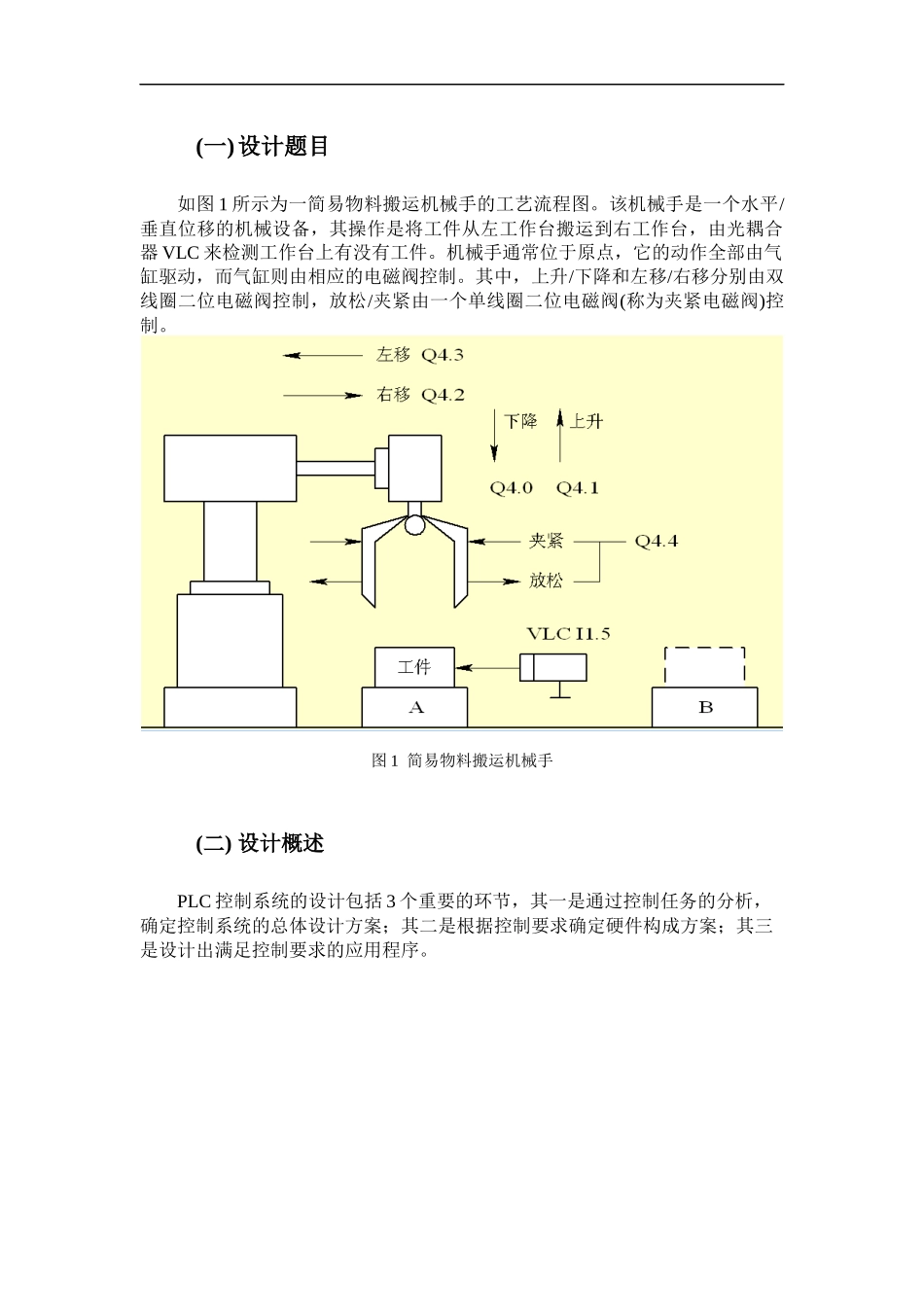
物料搬运机械手系统PLC编程设计课程名称:可编程控制器原理及应用任课教师:冯治国老师班级:机制102班学号:姓名:一、设计题目及概述成绩(一)设计题目如图1所示为一简易物料搬运机械手的工艺流程图
该机械手是一个水平/垂直位移的机械设备,其操作是将工件从左工作台搬运到右工作台,由光耦合器VLC来检测工作台上有没有工件
机械手通常位于原点,它的动作全部由气缸驱动,而气缸则由相应的电磁阀控制
其中,上升/下降和左移/右移分别由双线圈二位电磁阀控制,放松/夹紧由一个单线圈二位电磁阀(称为夹紧电磁阀)控制
图1简易物料搬运机械手(二)设计概述PLC控制系统的设计包括3个重要的环节,其一是通过控制任务的分析,确定控制系统的总体设计方案;其二是根据控制要求确定硬件构成方案;其三是设计出满足控制要求的应用程序
二、对设计任务的深入调查研究(一)机械手的工作方式此系统需要具备多种工作方式,如既能自动的循环运行一个过程,也能进行手动操作运行一个工作步等
常见的工作方式有联系、单周期、单步和手动
单周期方式机械手在原位压左限位开关和上限位开关
按一次操作按钮机械手开始下降,下降到左工位压动下限位开关后自停;接着机械手夹紧工件后开始上升,上升到原位压动上限位开关后自停;接着机械手开始右行直至压动右限位开关开关后自停;接着机械手下降,下降到右工位压动下限位开关(两个工位用一个下限位开关)后自停;接着机械手放松工件后开始上升直至压动上限位开关后自停(两个工位用一个上限位开关);接着机械手开始左行直至压动左限位开关后自停
至此一个周期的动作结束,再按一次操作按钮则开始下一个周期的运行
连续方式启动后机械手反复运行上述每个周期的动作过程,即周期性连续运行
单步方式每按一次操作按钮,机械手完成一个工作步
例如,按一次操作按钮机械手开始下降,下降到左限位压动下限位开关自停,欲使之运行下一个工作步,