_糯热僦口囫接上期悬挂运动控制系统(下)四、软件设计软件设计是该设计的是魂.所有的数据采集,数据远算,产生电机控制信号,都是由软件完成.软件质■高低直接决定系统的功能和精度
1模型的数学算法和编程思想【1)点到点移动的设计实现从一点移动到设定的坐标点.一点坐标和其对应的S1.s2线长存在如下几何关系.如图8所示
程序先由起始点的坐标计算出其对应的S1.s2值.再计算结束点对应的s1,s2值,求出s1和s1.s2和s2之间的差值.由其差值决定与S1.s2对应的电机的正反转和转动的圈数
驱动电机转动,使画笔移动到指定坐标点
25cm1为圆心画出半径为25cm的四.如图9折线所示.圉中的折点为在圆周上取高圆周最接近的N个小方格构成的特征点.N取的越多.其连线越近似为实际四周
把N个特征点列表存储在程序存储器中.单片机依次两两调用到表中的点.执行点到点的子程序,所有点调用完成后即完成一个划圆的任务
目8点■点#自月ai童目【2l画四方案设计其中圆的定位思想为.首先以l25cm2220loVOL'O对于以任意坐标为圆心的圊的画法.只要根据输八的圆心坐标和参考圆圆心C以25.25为圆心)之间的偏移■去修正特征点的坐标I用取出的特征点坐标分别加,拽两圆心之间x和Y的差值】.来确定各个实际特征点的坐标值.再谓用画圆子程序就完成画任意圆
f3)自定义轨迹设计方案自定义轨迹的思想等同于画圆的思想.取轨迹上的特征点.调用点到点子程序实现
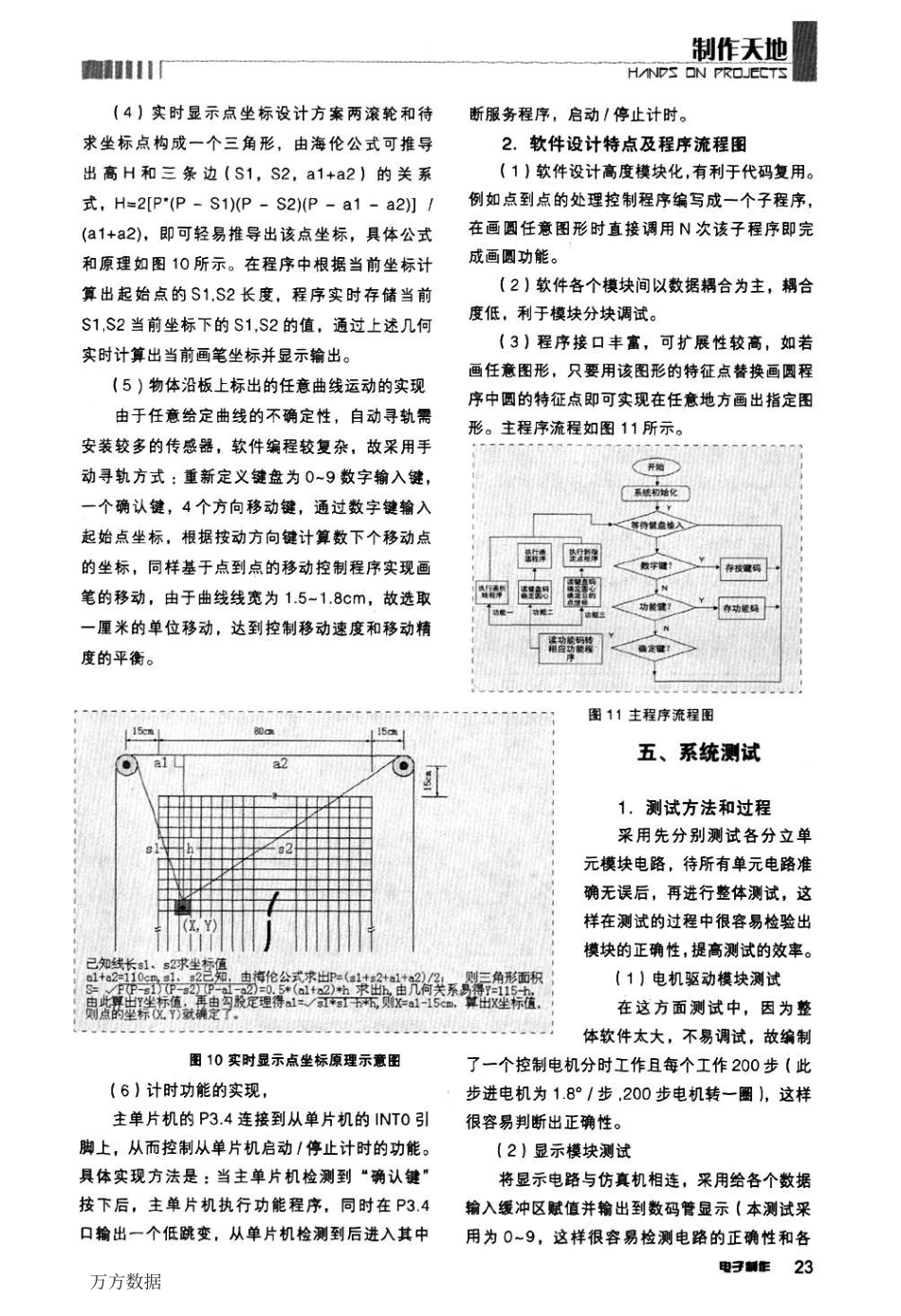
万方数据I4】实时显示点坐标设计方案两滚轮和待隶坐标点构成一个三角形+由海伦公式可推导出高H和三条边(S1.s2.al+a2I的关系式.H=2[P
(P—S1)(P—S2)(P—al—a2)】/(al+a2).即可轻易推导出该点坐标,具体公式和原理如图10所示
在程序中根据当前坐标计算出起始点的s1S2长度.程序实时存储当前s1s2当前坐标下的s1+s