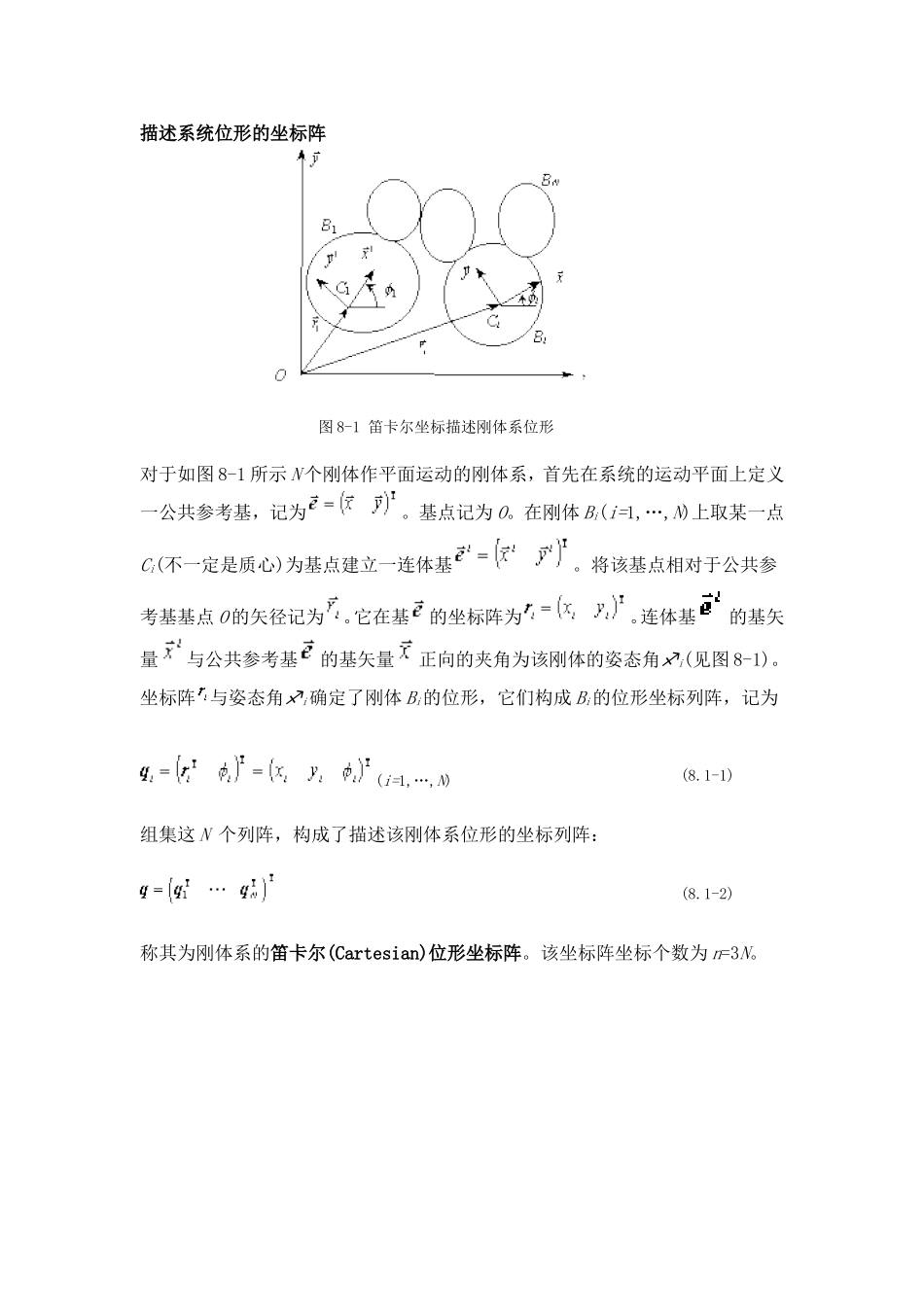
描述系统位形的坐标阵图8-1笛卡尔坐标描述刚体系位形对于如图8-1所示N个刚体作平面运动的刚体系,首先在系统的运动平面上定义一公共参考基,记为
在刚体Bi(i=1,…,N)上取某一点Ci(不一定是质心)为基点建立一连体基
将该基点相对于公共参考基基点O的矢径记为
它在基的坐标阵为
连体基的基矢量与公共参考基的基矢量正向的夹角为该刚体的姿态角i(见图8-1)
坐标阵与姿态角i确定了刚体Bi的位形,它们构成Bi的位形坐标列阵,记为(i=1,…,N)(8
1-1)组集这N个列阵,构成了描述该刚体系位形的坐标列阵:(8
1-2)称其为刚体系的笛卡尔(Cartesian)位形坐标阵
该坐标阵坐标个数为n=3N
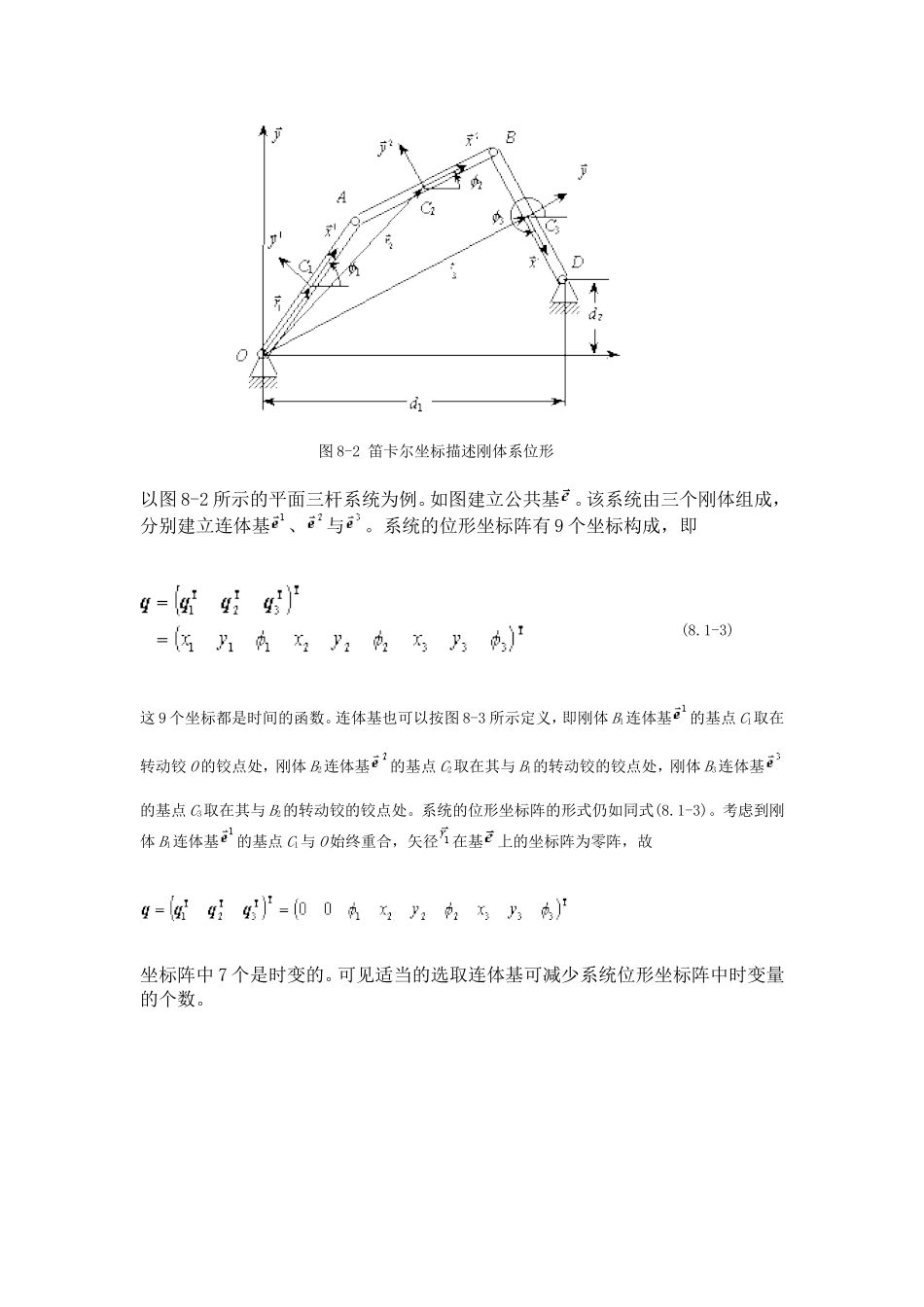
图8-2笛卡尔坐标描述刚体系位形以图8-2所示的平面三杆系统为例
如图建立公共基
该系统由三个刚体组成,分别建立连体基、与
系统的位形坐标阵有9个坐标构成,即(8
1-3)这9个坐标都是时间的函数
连体基也可以按图8-3所示定义,即刚体B1连体基的基点C1取在转动铰O的铰点处,刚体B2连体基的基点C2取在其与B1的转动铰的铰点处,刚体B3连体基的基点C3取在其与B2的转动铰的铰点处
系统的位形坐标阵的形式仍如同式(8
考虑到刚体B1连体基的基点C1与O始终重合,矢径在基上的坐标阵为零阵,故坐标阵中7个是时变的
可见适当的选取连体基可减少系统位形坐标阵中时变量的个数
图8-3连体基的基点在铰点上的情况对于上述平面三杆系统也可按如下的方式描述其位形
首先如图8-3所示建立各刚体的连体基
刚体B1的位形坐标为基点C2的矢径在的坐标阵为(其中l1为B1的杆长)
如果刚体B1的位形已经确定,定义如下的坐标阵同样可确定刚体B2的位形基点C3的矢径由基点C2指向C3的矢径替代,后者在的坐标阵为(其中l2为B2的杆长)
如果刚体B2的位形已经确定,定义如下的坐标阵同样