第4章机械手液压系统设计4
1机械手的工作原理分析液压自动上下料机械手是自动化流水生产线中广泛应用的工件搬运机械设备,它是流水线作业中不可或缺的运输单元
按其工作介质是油还是水(乳化液)液压机可分为油压机和水压机两种,以油为介质的液压机械手
液压机械手要求液压系统完成的主要动作是(工件平放):大臂下降300mm—夹紧工件—手腕上翻90°—大臂上升300mm—大臂回转90°—手臂延伸500mm—放松工件—手臂收缩500mm—手腕下翻90°—大臂回转90°—大臂下降300mm
整个周期要完成所有动作必须由五个液压缸协调动作才能做到,其中两个回转液压缸和3各活塞式液压缸
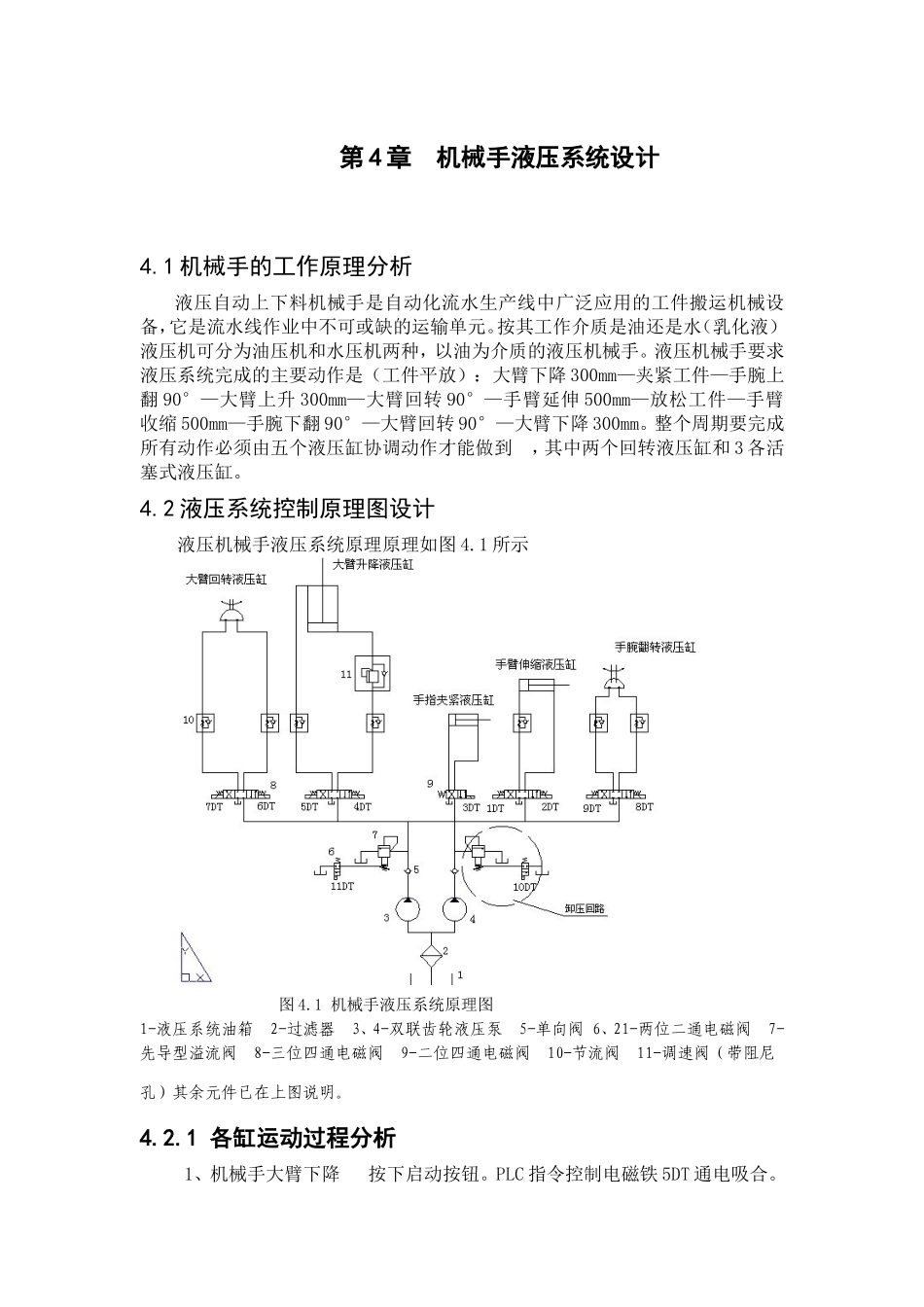
2液压系统控制原理图设计液压机械手液压系统原理原理如图4
1机械手液压系统原理图1-液压系统油箱2-过滤器3、4-双联齿轮液压泵5-单向阀6、21-两位二通电磁阀7-先导型溢流阀8-三位四通电磁阀9-二位四通电磁阀10-节流阀11-调速阀(带阻尼孔)其余元件已在上图说明
1各缸运动过程分析1、机械手大臂下降按下启动按钮
PLC指令控制电磁铁5DT通电吸合
泵3供油经单向阀5,流经图4
1所示从左到右第二个三位四通电磁阀左位,然后流经节流阀和单向阀构成的调速阀,然后直接流向大臂升降液压缸的上腔,从而推动机械手做下降运动
2、夹紧工件在整机启动的情况下,泵4供油流经单向阀,然后PLC控制程序指令控制电磁铁3DT通电吸合,此时此二位四通电磁阀处于右位,液压油直接流进机械手手指夹紧液压缸的右腔,从而拉动滑槽杠杆式手部结构夹紧工件
此时电磁换向阀通电不变,直到接到放松工件指令才断电,此时因液压缸保持不动,回路压力升高,到达先导型溢流阀的设定压力时,溢流阀开启,然回路压力保持不变,仍然能够保持夹紧需要
3、手腕上翻PLC指令控制电磁铁8DT通电吸合
泵3供油经单向阀5,流经图4
1所示从左到右第四个三