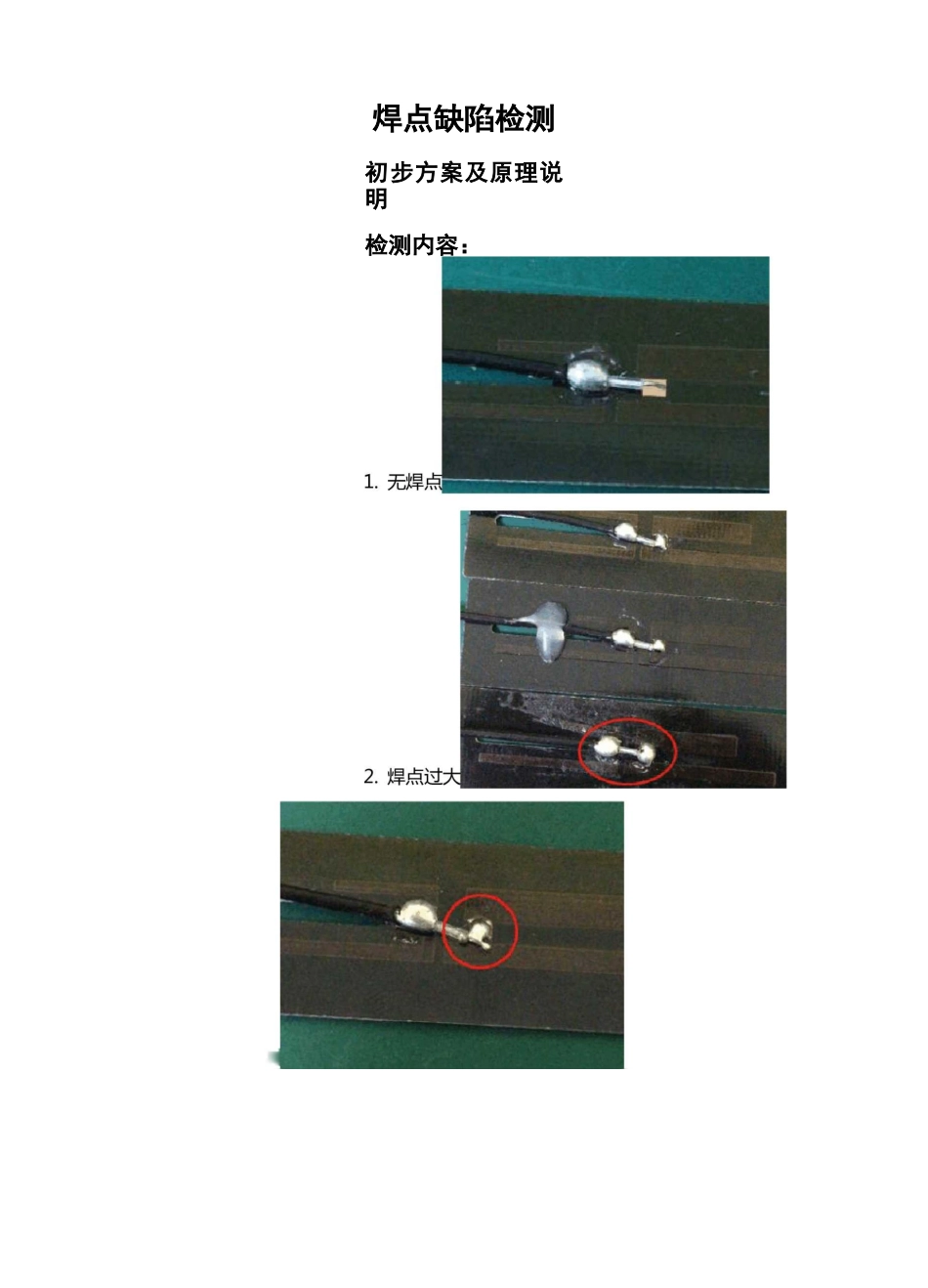
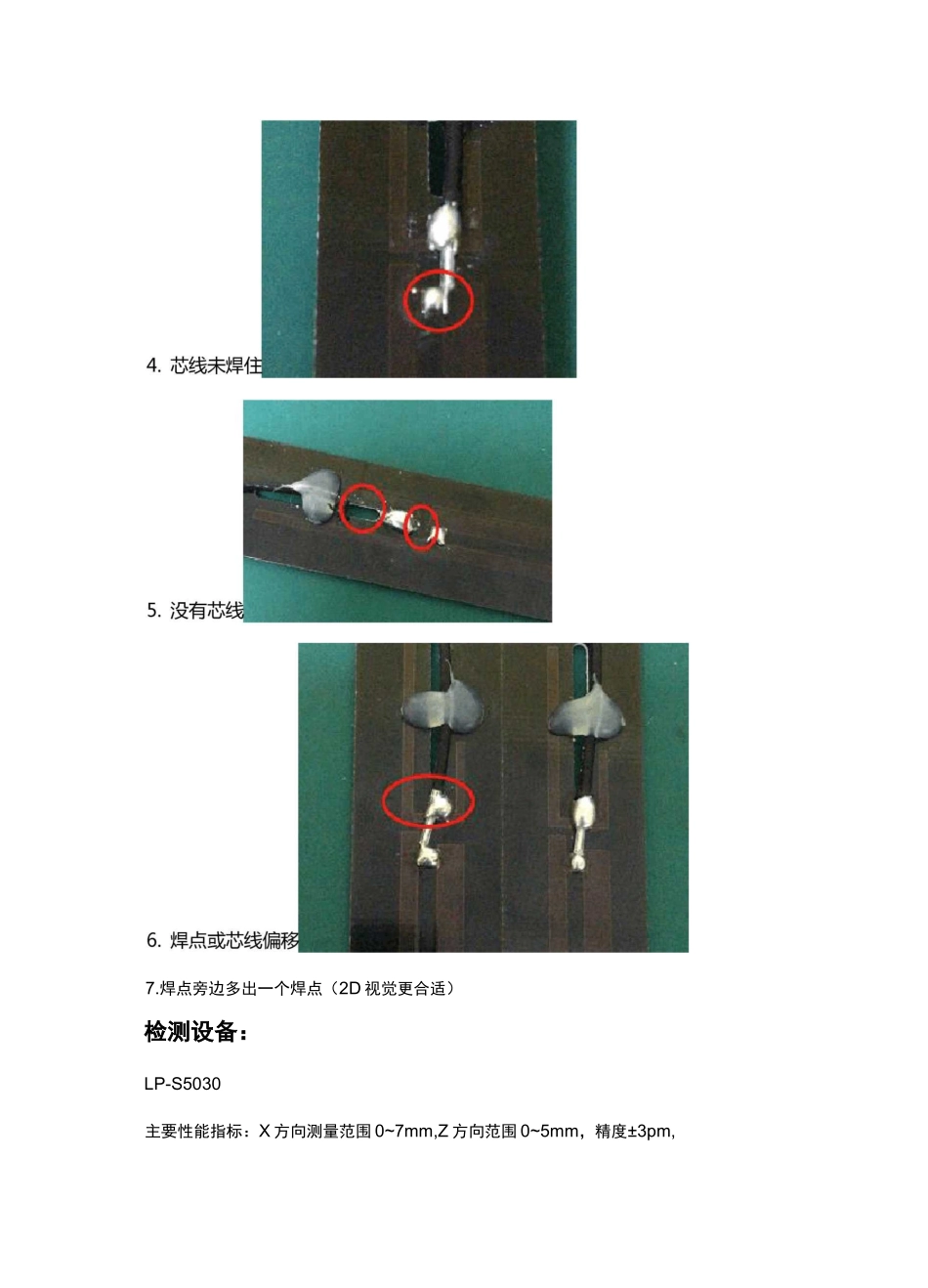
芯线部分外漏焊点缺陷检测初步方案及原理说明检测内容:7
焊点旁边多出一个焊点(2D视觉更合适)检测设备:LP-S5030主要性能指标:X方向测量范围0~7mm,Z方向范围0~5mm,精度±3pm,重复精度1pm
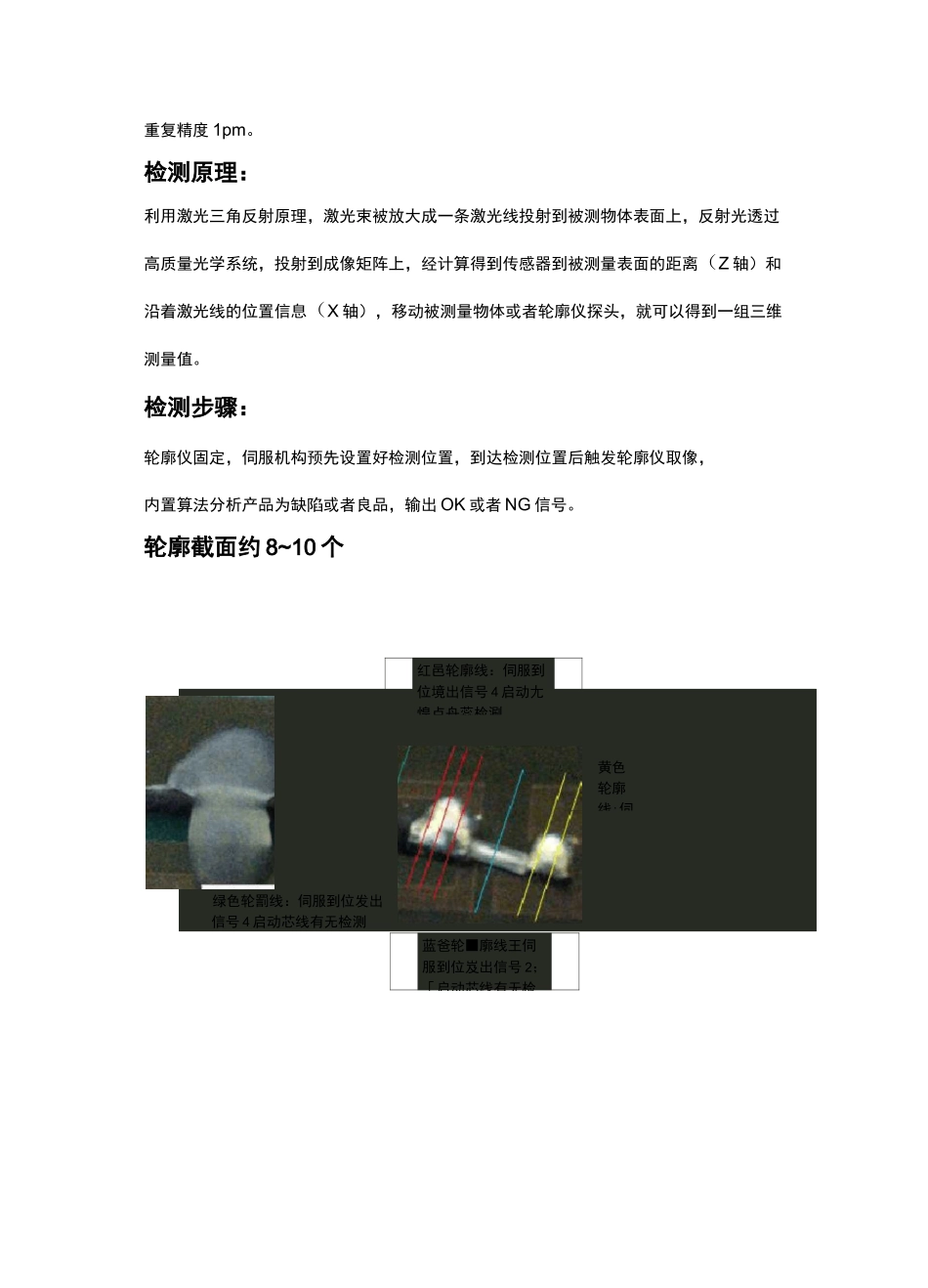
检测原理:利用激光三角反射原理,激光束被放大成一条激光线投射到被测物体表面上,反射光透过高质量光学系统,投射到成像矩阵上,经计算得到传感器到被测量表面的距离(Z轴)和沿着激光线的位置信息(X轴),移动被测量物体或者轮廓仪探头,就可以得到一组三维测量值
检测步骤:轮廓仪固定,伺服机构预先设置好检测位置,到达检测位置后触发轮廓仪取像,内置算法分析产品为缺陷或者良品,输出OK或者NG信号
轮廓截面约8~10个绿色轮罰线:伺服到位发出信号4启动芯线有无检测红邑轮廓线:伺服到位境出信号4启动尢惶点舟蕊检涮黄色轮廓线;伺蓝爸轮■廓线王伺服到位岌出信号2;「启动芯线有无检it£LP-S5030I焊点标准图像及轮廓:标准品原始图像算法分析:算法1:计算峰值点相对平面高度差,设置阈值MAXH及MINH,过大或者过小直接判为NG,输出信号1
可检出的缺陷为焊点过高或过低
算法2:经过算法1判为OK的进行算法2,在最高点和水平面中间取一条边缘线,求出两个边缘点,进而求出焊点宽度,设置阈值MAXV及MINV,过大或者过小判断为NG,输出信号2
可检出的缺陷为焊点过大或无焊点
算法3:经过算法2判为OK的进行算法3,分析算法2里的峰值点和两个边缘点的对称关系,设置阈值MAXSHIFT,过大则判断为NG,输出信号3
可检出因芯线不正导致的焊点形变过大
算法4:经过算法3判为OK的进行算法4,分析单个轮廓线中相邻点的高度差,设置阈值MAXSMOOTH,正常情况下大于该阈值的应该只有2个点,即焊点和PCB板的交接处,如果超过2个或者多个(调试确认),则基本为缺陷品,输出信号4
此算法可检出的缺