基于工业摄影与机器视觉的三维测量技术综述摄影测量(Photogrammetry)是一门通过分析记录在胶片或电子载体上的影像来定被测物体的位置、形状和大小的科学,属于测绘学的分支学科
它包括航空摄测量、航天摄影测量和近景摄影测量等
其中,近景摄影测量是指测量范围小于100米,相机布设在物体附近的摄影测量
近年来,随着微电子和半导体技术的飞速发展,尤其是固体阵相机和计算机硬件的发展,使得工业摄影测量已进入全数字近景摄影测量时代
同时,随着机器视觉理论的迅速发展,机器视觉也逐渐发展成一门由计算机技术、控制理论、人工智能和模式识别等众多领域交叉综合的新学科
三维形貌与变形测量技术简介光学三维形貌与变形测量技术经过近年来的快速发展,涌现出多种技术及方法
其中主要有:时间飞行法、全息干涉法、莫尔条纹法、结构光方法(点、线面)、数字摄影测量法和数字图像相关法等,下面介绍几种常用的三维测量方法,并分析在这些方面的研究发展情况
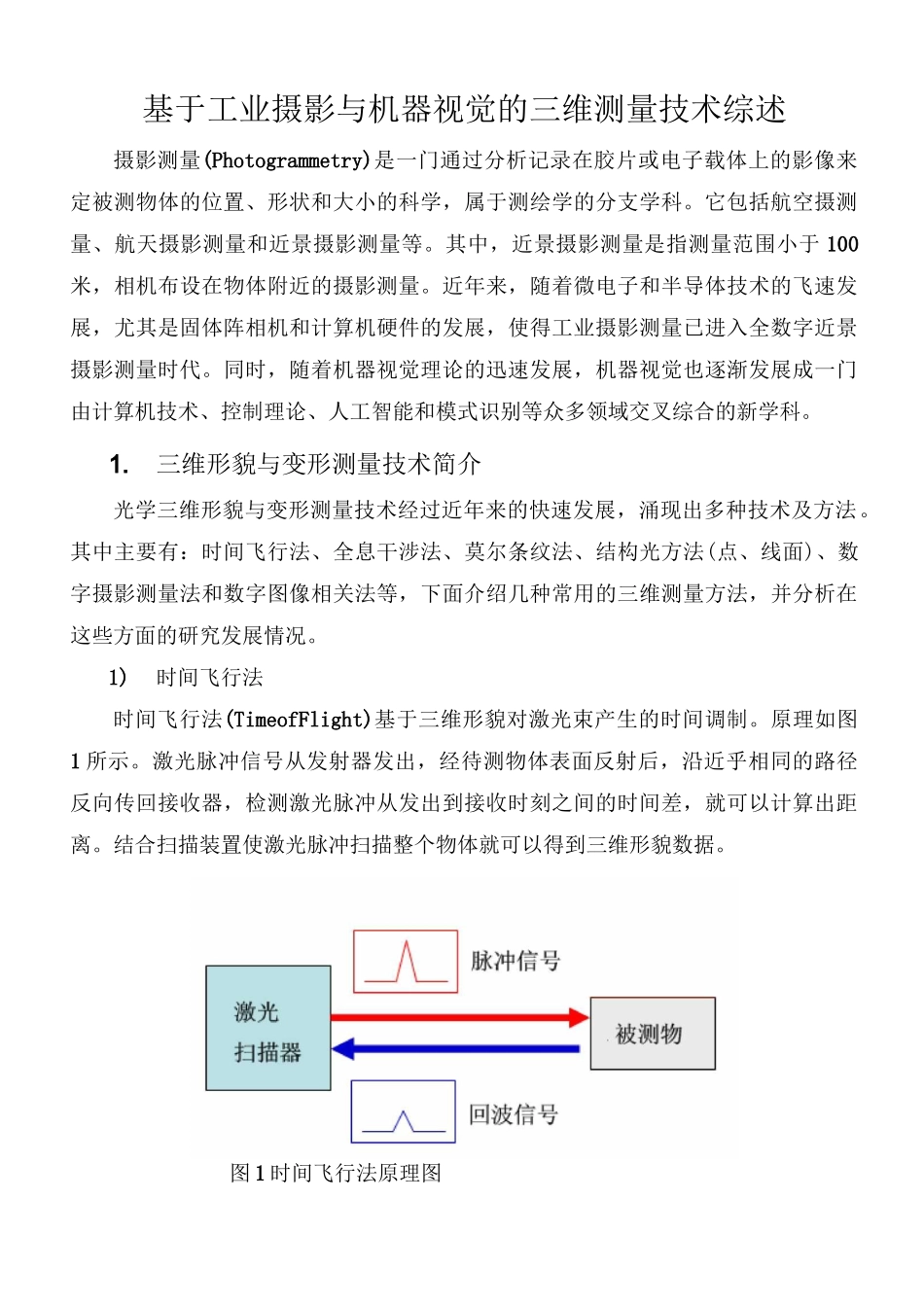
1)时间飞行法时间飞行法(TimeofFlight)基于三维形貌对激光束产生的时间调制
原理如图1所示
激光脉冲信号从发射器发出,经待测物体表面反射后,沿近乎相同的路径反向传回接收器,检测激光脉冲从发出到接收时刻之间的时间差,就可以计算出距离
结合扫描装置使激光脉冲扫描整个物体就可以得到三维形貌数据
图1时间飞行法原理图时间飞行法的分辨率约为1mm
若采用亚皮秒激光脉冲和高分辨率的电子器件,深度分辨率可达亚毫米级
采用时间相干的单光子计数法,测量lm距离,深度分辨率可达30》m;另一种称之为飞行光全息技术的测量方法利用超短光脉冲结合数字重建,深度分辨率可达6
5》m,这种方法的优点是不存在阴影和遮挡问题
但是要得到较高的测量精度,对信号处理系统的时间分辨率有较高的要求
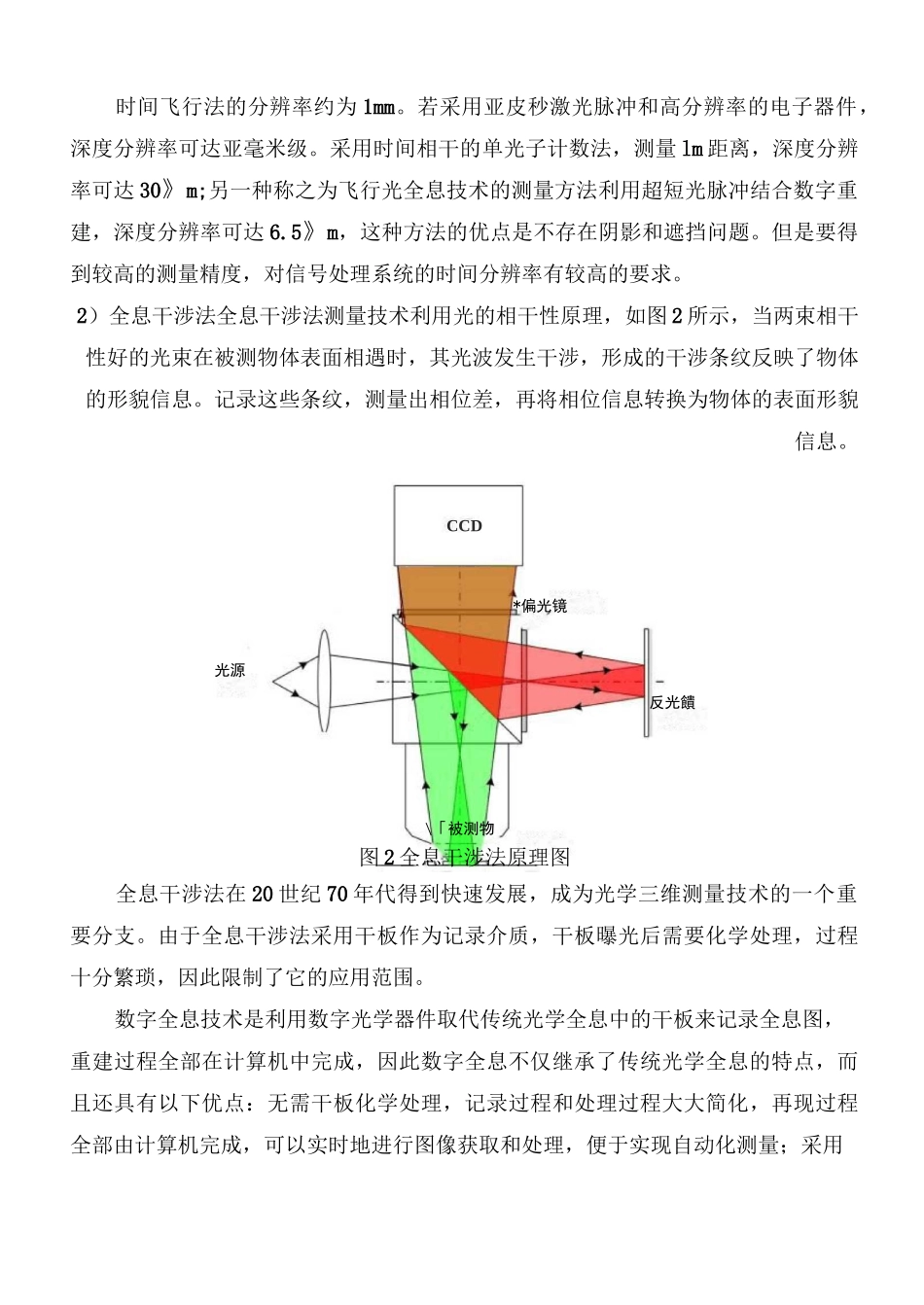
2)全息干涉法全息干涉法测量技术利用光的相干性原理,如图2所示,当两束相干性好的光束在被测物体表