AEB自动紧急制动1——什么是AEB自动紧急制动自动紧急制动Advanced/AutomaticEmergencyBraking;AEBAEB是一种汽车主动安全技术,能够实时检测车辆前方行驶环境,并在可能发生碰撞危险时自动启动车辆制动系统,使车辆减速,辅助驾驶员避免碰撞或减轻碰撞后果
当系统计算出会有碰撞可能时,首先会通过声音、图标等警示驾驶员,若驾驶员没能对预警起到正确反应,再轻微震动制动踏板或方向盘来二次预警,过程中提前填充制动油路油压,以便全力制动能快速准确的完成
简单点说AEB,就像你副驾驶的教练,能在危险的时候帮你踩刹车
AEB常见变化:自动紧急制动(AEB):当车辆感知到即将发生碰撞时,车辆会独立停车,以避免发生碰撞,或者降低无法避免的严重程度
向前自动紧急制动(AEB):在汽车向前行驶时,会自动应用制动,以防止碰撞或减小冲击力
后方自动紧急制动(AEB后部):当汽车在倒车方向行驶时,会自动施加制动以防止碰撞或减小冲击力
具有行人检测功能的自动紧急制动(AEB踏板):在汽车前进时,会自动施加制动,以防止与行人或骑自行车的人发生碰撞或减少冲击力
城市速度AEB(AEB-city):在城市速度(通常为80公里或以下)下,会自动应用制动器以防止碰撞或减小冲击力
高速公路速度AEB(高速公路AEB):在高速公路速度(每小时80公里以上)时,会自动应用制动器以防止碰撞或减小冲击力
2一一AEB是如何工作的AEB系统和其他辅助系统一样,由感知、决策、执行三大部分组成,具体来说就是由雷达、摄像头作为传感器构成感知部分,传感器内置ECU或独立的外置ECU完成决策,并将制动请求通过总线发送至执行器,通常是ESP,也可以是其他装置,例如线控制动系统或独立的高压蓄能器控制器对车辆进行制动
【感知】常见的感知方案有三种
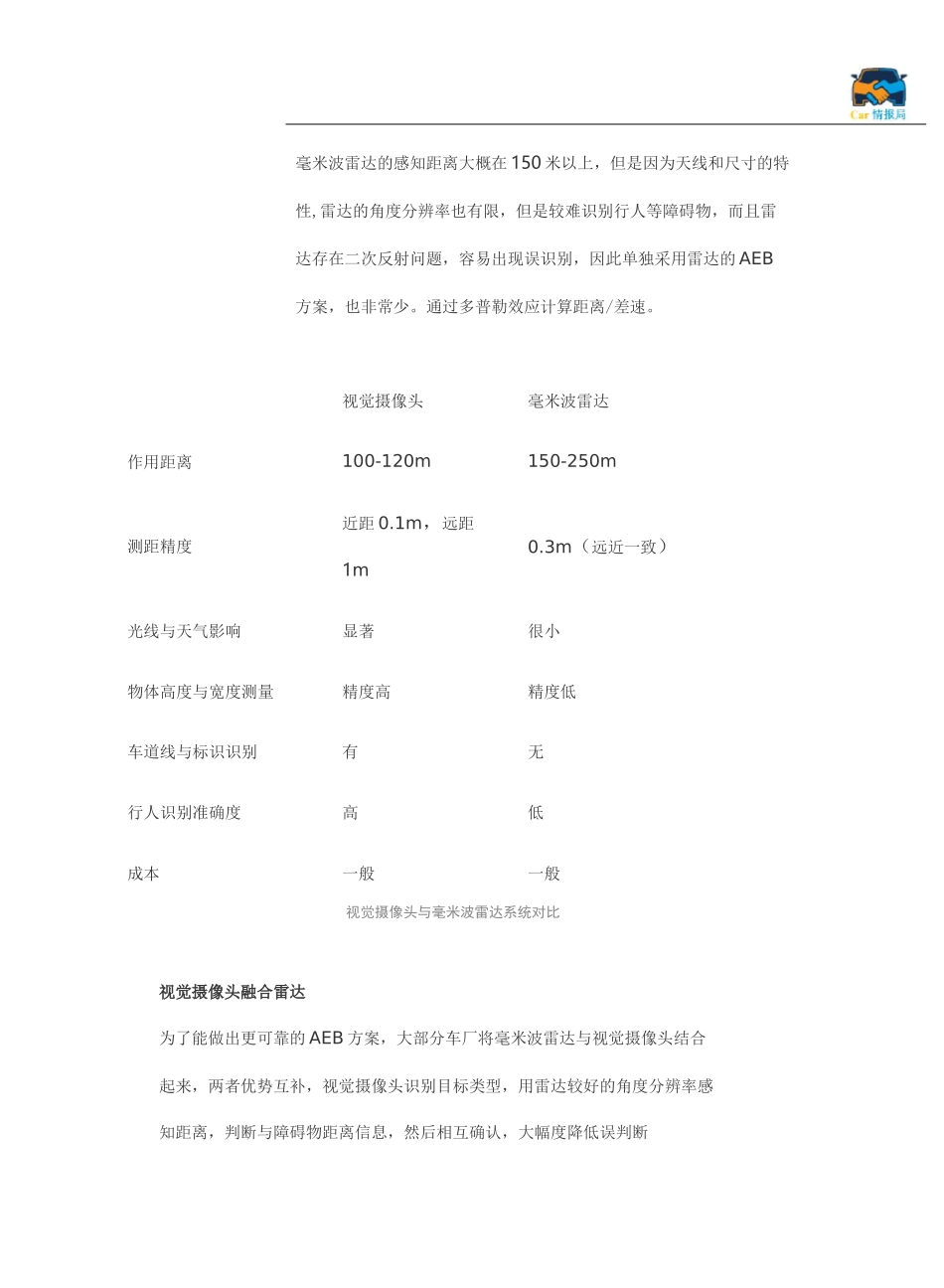
视觉摄像头:摄像头就像人眼一样,可跟踪识别行人障碍物等,感知距离大