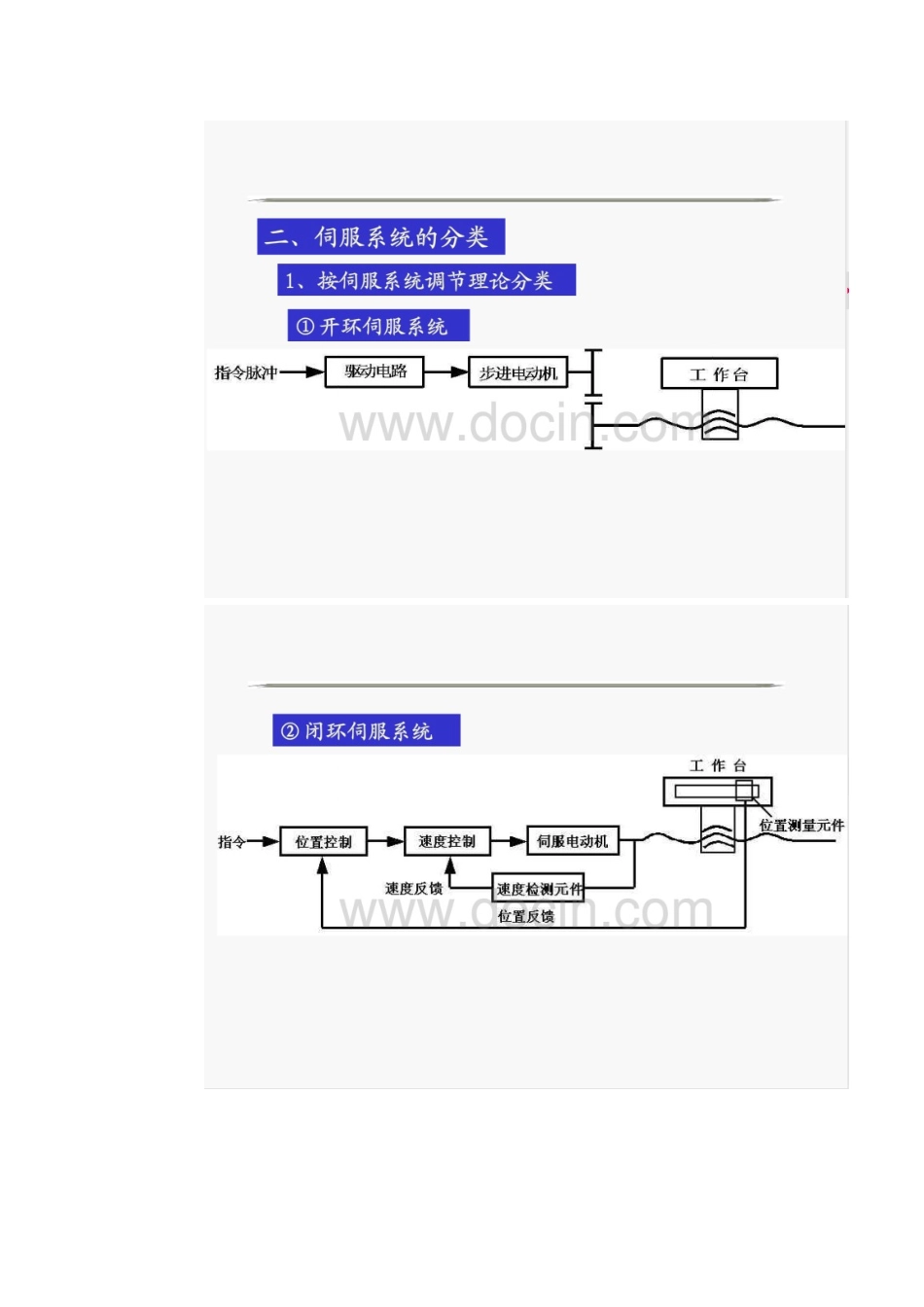
伺服电机的工作原理(简单的描述)就是你给它一个脉冲电机轴就转相应的角度(一转=360
比如你给一个脉冲电机轴转0
那么你要给720个脉冲电机轴就转360
也就是一转你控制好脉冲的个数就可以控制电机轴的转角控制脉冲的速度(1S的时间给出多少个)就可控制电机轴的速度)结构就是一台特殊电机加个编码器(装在轴的末端)就是了它的计数功能就是靠那编码器来实现的电机轴驱动编码器电机轴转一圈编码器也跟着转一圈但编码器就输出相映的脉冲个数比如(一转=720个)那么你采集编码器的信号再加以计算就可得到电机的角度和速度
伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0
伺服驱动器一般可以采用位置、速度和力矩三种控制方式,主要应用于高精度的定位系统,目前是传动技术的高端A/B/Z是编码器的3个脉冲输出端,A和B一般是两个相差0
25个周期的连续脉冲输出,通过分析2个脉冲的相位可以知道旋转方向,通过频率可以知道旋转的速度,Z脉冲式编码器旋转一圈才出现一个脉冲,它是编码器上面的一个固定的一个参照点,通过对它技术就知道转了多少圈,所以根据A/B/Z三个脉冲状态完全可以分析出编码器的运动状态,即速度,角度,方向,和旋转多圈的位置,编码器的输出脉冲信号中:A,B是基本的信号,用它可以辨别正转还是反转,速度是多少,多少脉冲,而Z信号则是零位信号,即编码器转一圈发出一个信号,可以用来测量转速,周期,等等,而A非B非Z非则是对应ABZ的反信号,如A输出1则A非输出0,