先进控制技术综述1引言在实际的工业控制过程中,很多系统具有高度的非线性、多变量耦合性、不确定性、信息不完全性和大滞后等特性
对于这种系统很难获得精确的数学模型,并且常规的控制无法获得满意的控制效果
面对这些复杂的工业控制产生了新的控制策略,即先进控制技术
先进控制技术包括:自适应控制,预测控制,推理控制,鲁棒控制以及包括模糊控制与神经网络在内的智能控制方法
本文详细介绍了自适应控制、预测控制以及这两种先进控制的应用领域和优缺点[1]
2自适应控制自适应控制的思想是对于系统中的不确定性,以及控制任务的艰巨性,对于部分未建模的动态特性、变化的被控对象和干扰信号,及时地测得它们的信息,并根据此信息按一定的设计方法,自动地做出控制决策、修改控制器结构和参数,使其控制信号能够适应对象和扰动的动态变化,在某种意义上达到控制效果最优或次优
2.1自适应控制介绍目前自适应控制的种类很多,从总体上可以分为三大类:自校正控制、模型参考自适应控制和其他类型的自适应控制
自校正控制的主要问题是用递推辨识算法辨识系统参数,根据系统运行指标来确定调节器或控制器的参数
其原理简单、容易实现,现已广泛地用在参数变化、有迟滞和时变过程特性,以及具有随机扰动的复杂系统
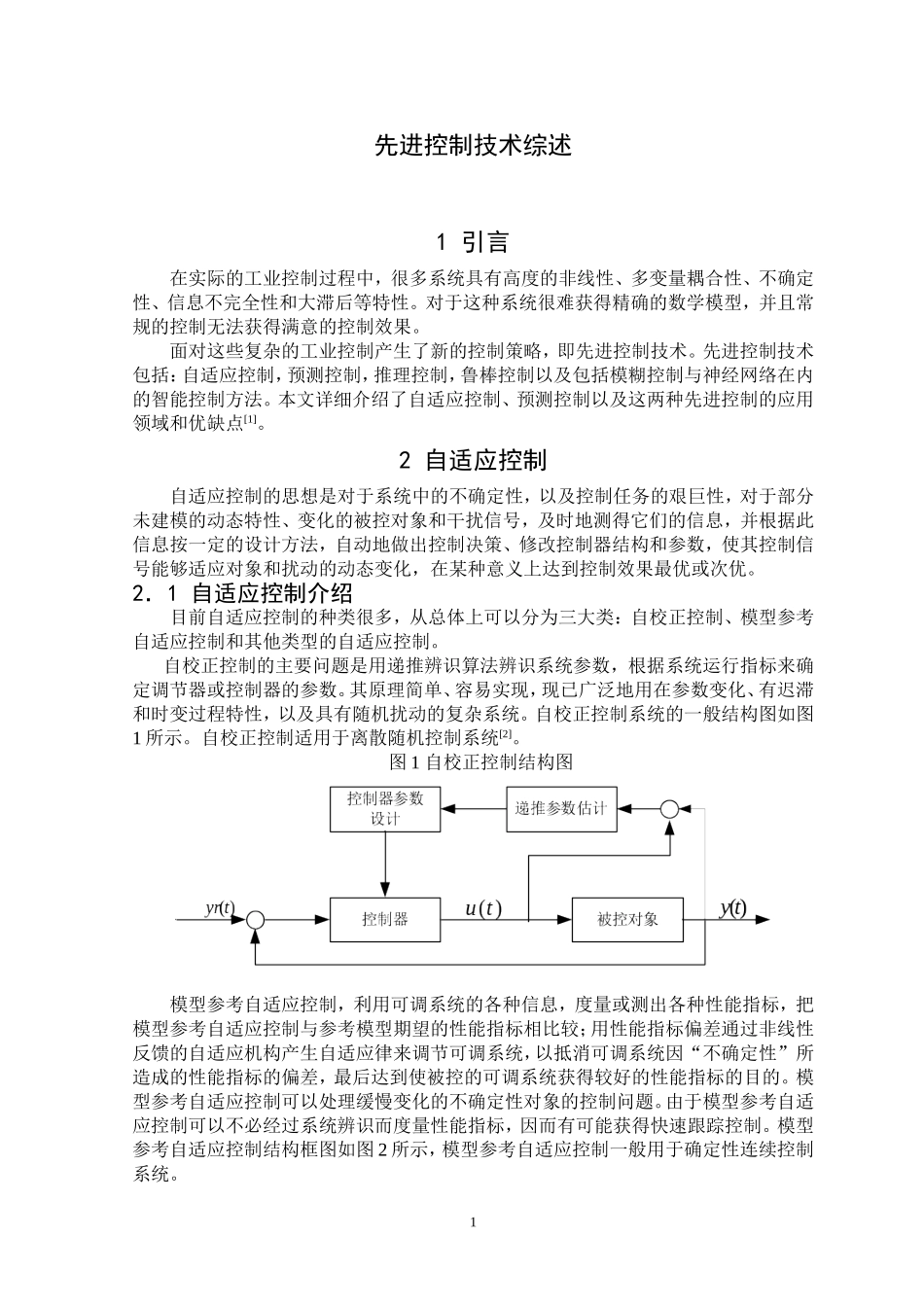
自校正控制系统的一般结构图如图1所示
自校正控制适用于离散随机控制系统[2]
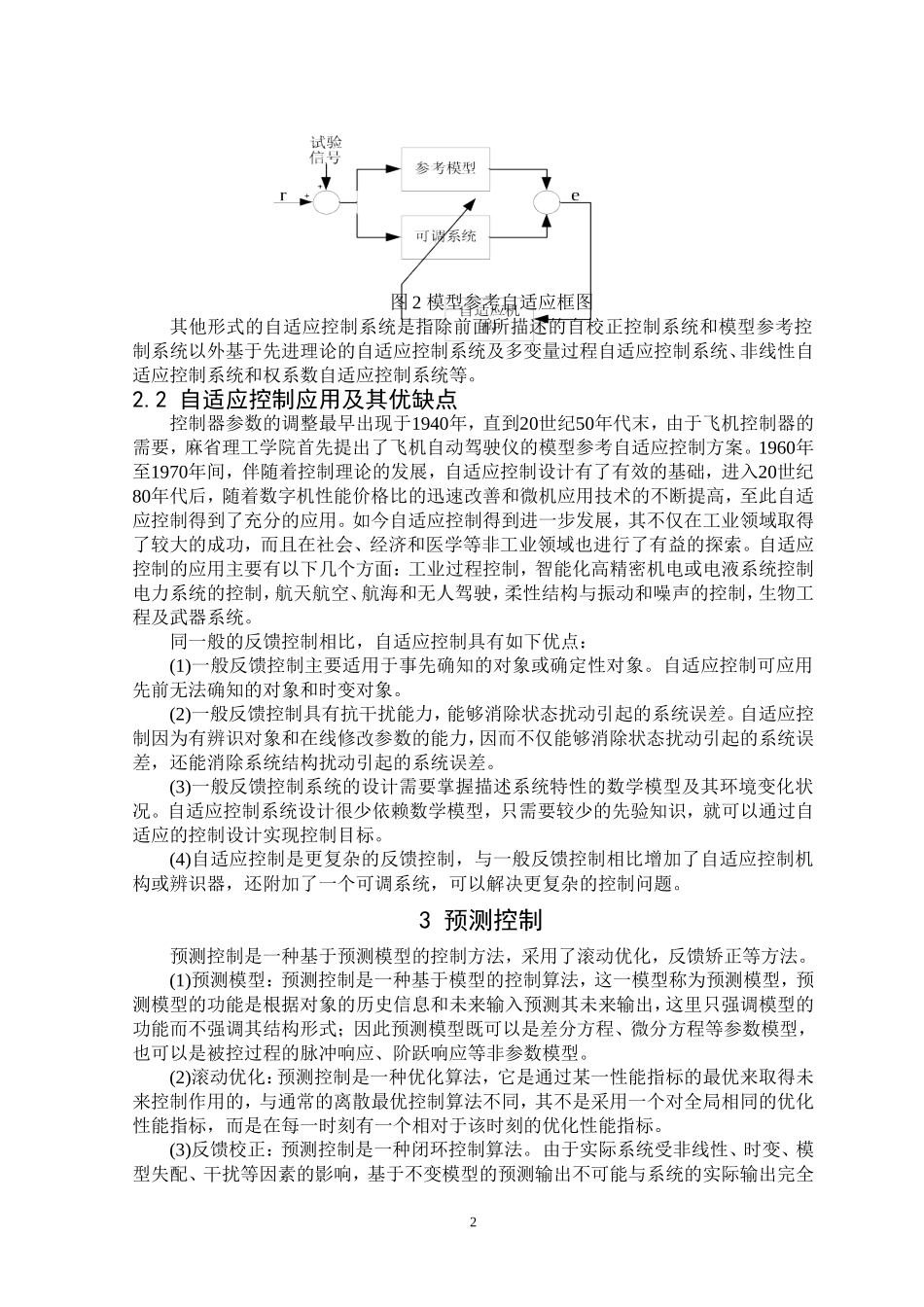
图1自校正控制结构图模型参考自适应控制,利用可调系统的各种信息,度量或测出各种性能指标,把模型参考自适应控制与参考模型期望的性能指标相比较;用性能指标偏差通过非线性反馈的自适应机构产生自适应律来调节可调系统,以抵消可调系统因“不确定性”所造成的性能指标的偏差,最后达到使被控的可调系统获得较好的性能指标的目的
模型参考自适应控制可以处理缓慢变化的不确定性对象的控制问题
由于模型参考自适应控制可以不必经过系统辨识而度量性能指标,因而有可能获得快速跟踪控制
模型参考自适应控