第 六 章 机 械 技 术第 一 节 概 述 机电一体化系统的机械系统是由计算机信息网络协调与控制的,与一般的机械系统相比,除要求具有较高的定位精度之外,还应具有良好的动态响应特性,就是说响应要快、稳定性要好
一个典型的机电一体化系统通常由控制部件、接口电路、功率放大电路、执行元件、机械传动部件、导向支承部件,以及检测传感部件等部分组成
这里所说的机械系统,—般由减速装置、丝杠螺母副、蜗轮蜗杆副等各种线性传动部件以及连杆机构、凸轮机构等非线性传动部件、导向支承部件、旋转支承部件、轴系及架体等机构组成
为确保机械系统的传动精度和工作稳定性,通常对机电一体化系统提出以下要求: (1) 高精度 精度直接影响产品的质量,尤其是机电一体化产品,其技术性能、工艺水平和功能比普通的机械产品都有很大的提高,因此机电一体化机械系统的高精度是其首要的要求
如果机械系统的精度不能满足要求,则无论机电一体化产品其它系统工作怎样精确,也无法完成其预定的机械操作
(2) 快速响应性 即要求机械系统从接到指令到开始执行指令指定的任务之间的时间间隔短,这样控制系统才能及时根据机械系统的运行状态信息,下达指令,使其准确地完成任务
(3) 良好的稳定性 即要求机械系统的工作性能不受外界环境的影响,抗干扰能力强
此外还要求机械系统具有较大的刚度,良好的耐磨、减摩性和可靠性,消震和低噪音,重量轻、体积小、寿命长
本章将机电一体化机械系统分成机械传动和支承部件两大部分,分别介绍较典型的传动部件、旋转和导向支承部件等的总体布局、机构选型、结构设计的优化等基本问题
第 二 节 机 械 传 动一 、同 步 带 传 动 同步带传动早在1900年已有人研究并多次提出专利,但其实用化却是在二次世界大战以后
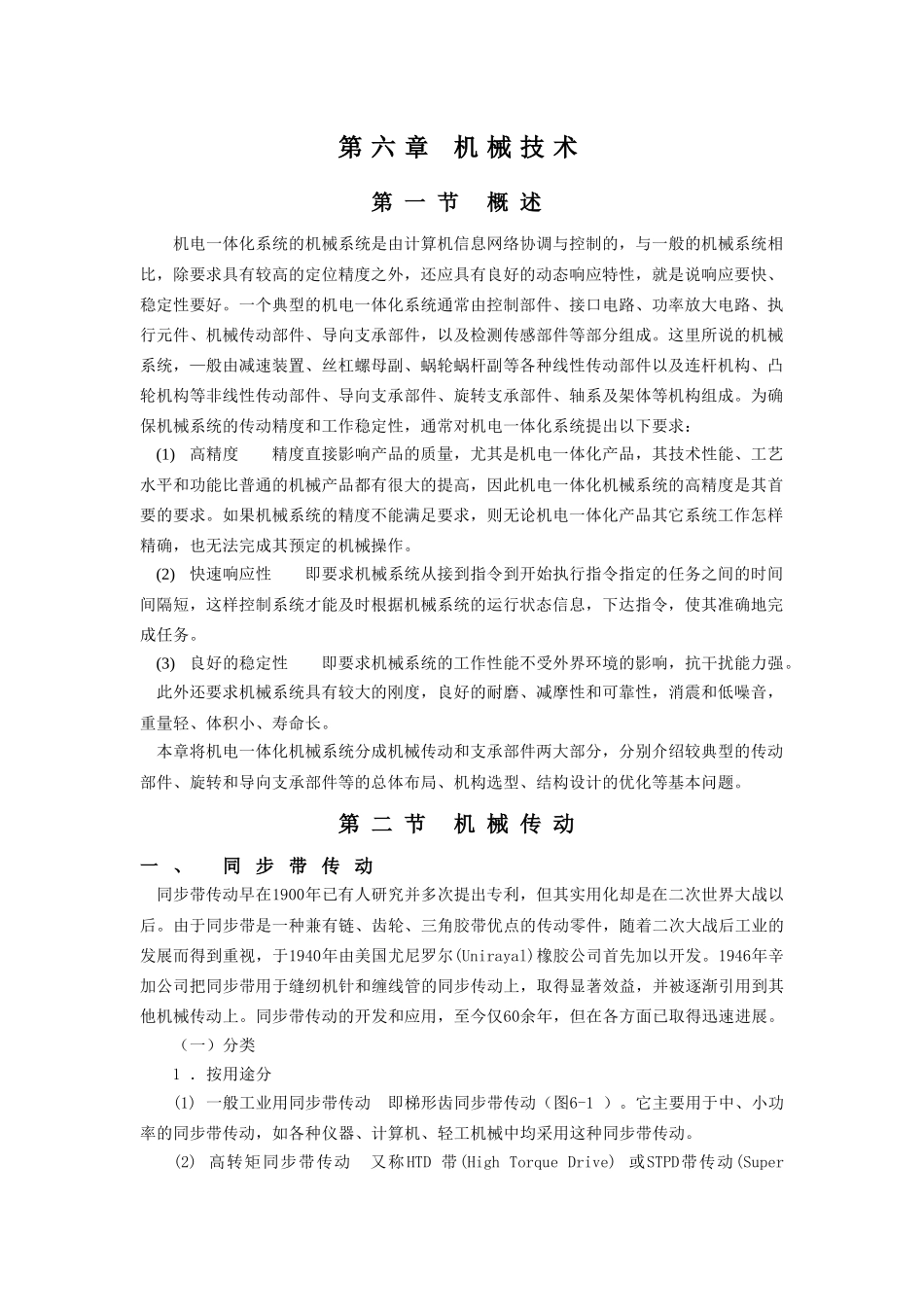
由于同步带是一种兼有链、齿轮、三角胶带优点的传动零件,随着二次大战后工业的发展而得到重视,于1940年由美国尤尼罗