基于 STM32 的汽车防碰撞系统设计标签: 单片机 经验分享摘 要本文设计是基于 STM32 开发板,设计的一个简易的汽车防碰撞系统
该系统分为高速和低速两个挡位,通过判断按键操作进行档位转换
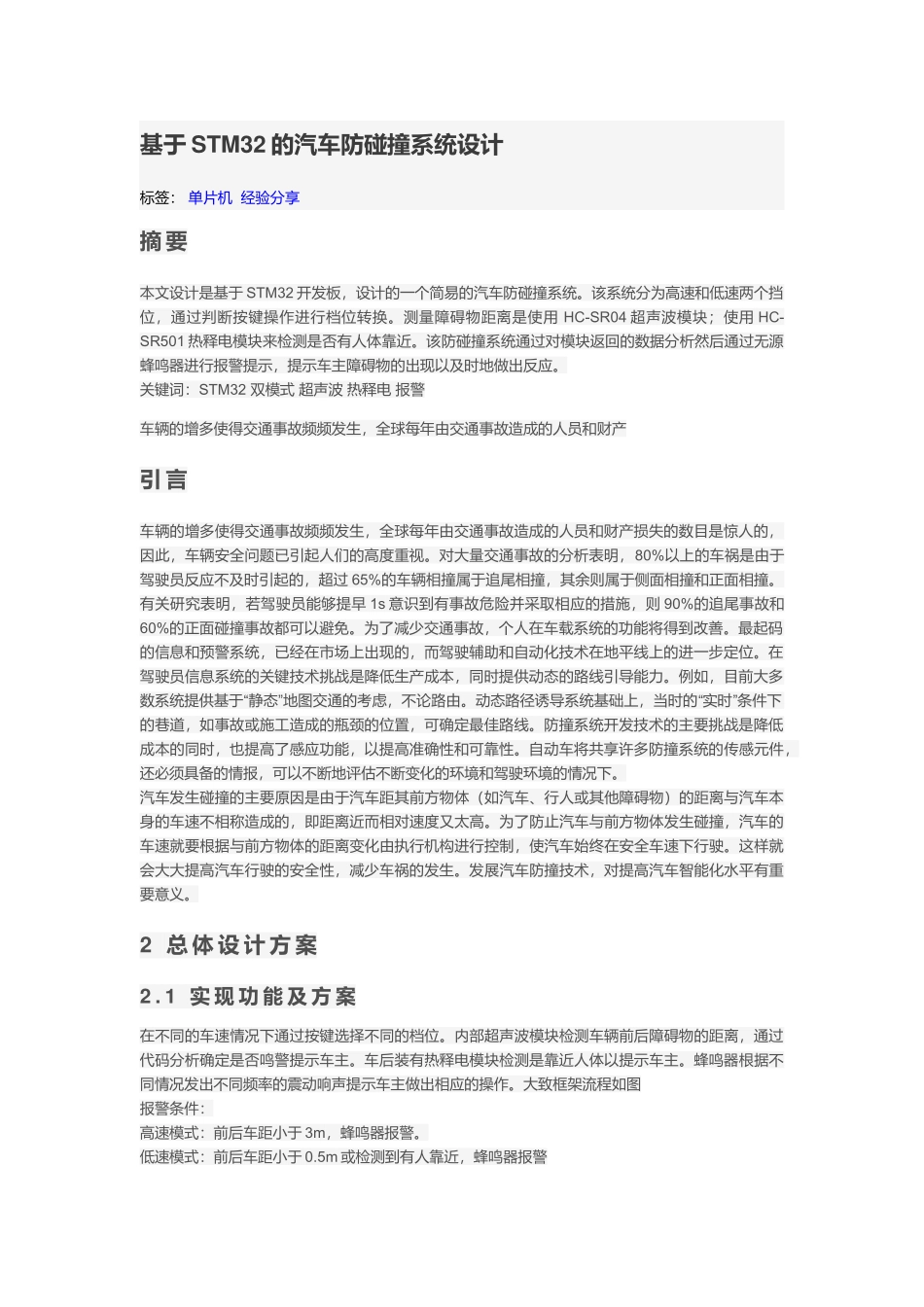
测量障碍物距离是使用 HC-SR04 超声波模块;使用 HC-SR501 热释电模块来检测是否有人体靠近
该防碰撞系统通过对模块返回的数据分析然后通过无源蜂鸣器进行报警提示,提示车主障碍物的出现以及时地做出反应
关键词:STM32 双模式 超声波 热释电 报警车辆的增多使得交通事故频频发生,全球每年由交通事故造成的人员和财产引 言车辆的增多使得交通事故频频发生,全球每年由交通事故造成的人员和财产损失的数目是惊人的,因此,车辆安全问题已引起人们的高度重视
对大量交通事故的分析表明,80%以上的车祸是由于驾驶员反应不及时引起的,超过 65%的车辆相撞属于追尾相撞,其余则属于侧面相撞和正面相撞
有关研究表明,若驾驶员能够提早 1s 意识到有事故危险并采取相应的措施,则 90%的追尾事故和60%的正面碰撞事故都可以避免
为了减少交通事故,个人在车载系统的功能将得到改善
最起码的信息和预警系统,已经在市场上出现的,而驾驶辅助和自动化技术在地平线上的进一步定位
在驾驶员信息系统的关键技术挑战是降低生产成本,同时提供动态的路线引导能力
例如,目前大多“”“”数系统提供基于 静态 地图交通的考虑,不论路由
动态路径诱导系统基础上,当时的 实时 条件下的巷道,如事故或施工造成的瓶颈的位置,可确定最佳路线
防撞系统开发技术的主要挑战是降低成本的同时,也提高了感应功能,以提高准确性和可靠性
自动车将共享许多防撞系统的传感元件,还必须具备的情报,可以不断地评估不断变化的环境和驾驶环境的情况下
汽车发生碰撞的主要原因是由于汽车距其前方物体(如汽车、行人或其他障碍物)的距离与汽车本身的车速不相称造成的,即距离