14 应用指令简单定位设计范例 DVP-PLC 应用技术手反转极限传感器 X0工作物DOG( 近点)传感器 X2正转极限传感器 X1伺服电机原点位置ASDA 伺服驱动器EHY0 脉冲输出Y1 正转 / 反转Y4 脉冲清除14-14
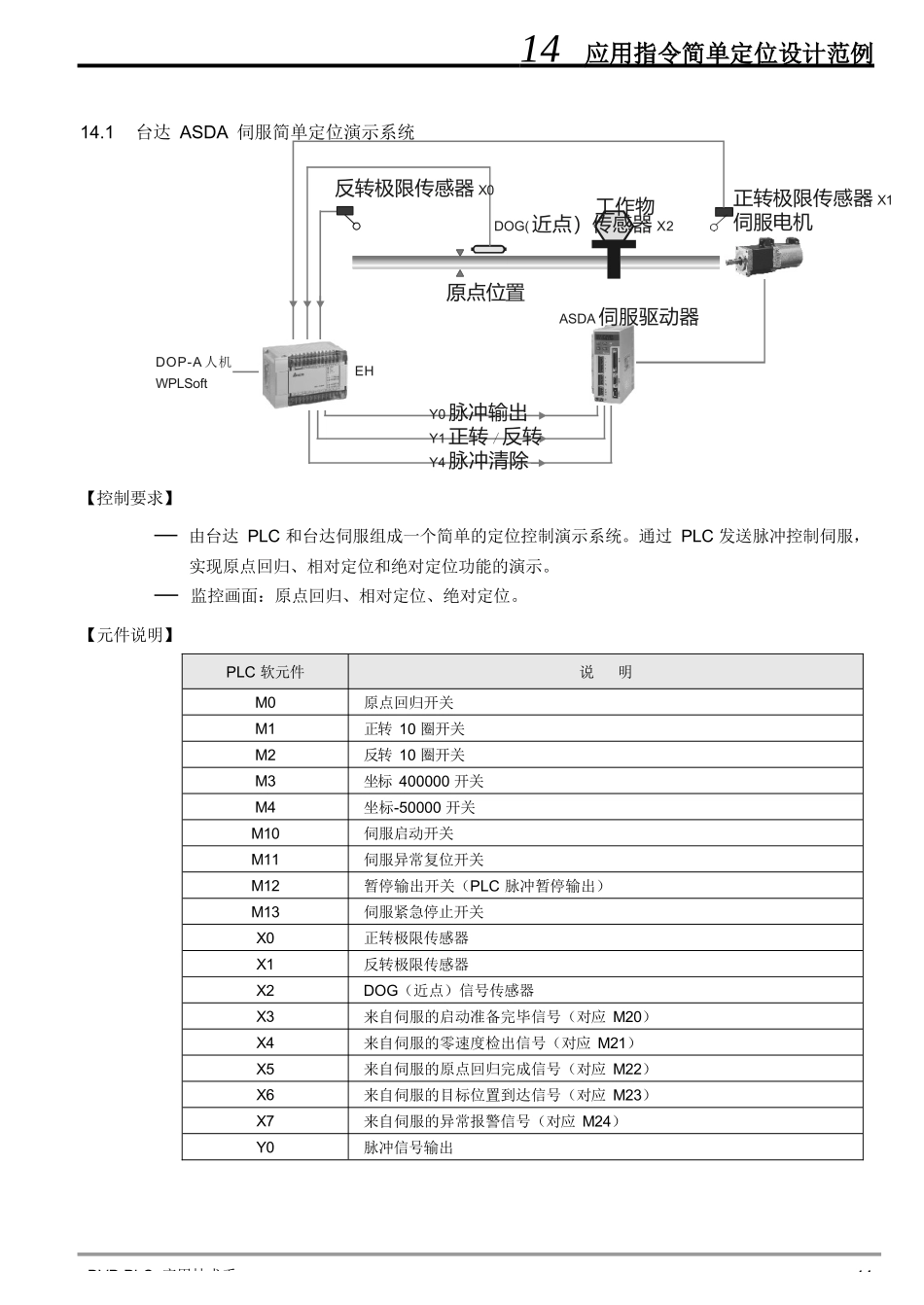
1台达 ASDA 伺服简单定位演示系统DOP-A 人机WPLSoft【控制要求】一 由台达 PLC 和台达伺服组成一个简单的定位控制演示系统
通过 PLC 发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示
一 监控画面:原点回归、相对定位、绝对定位
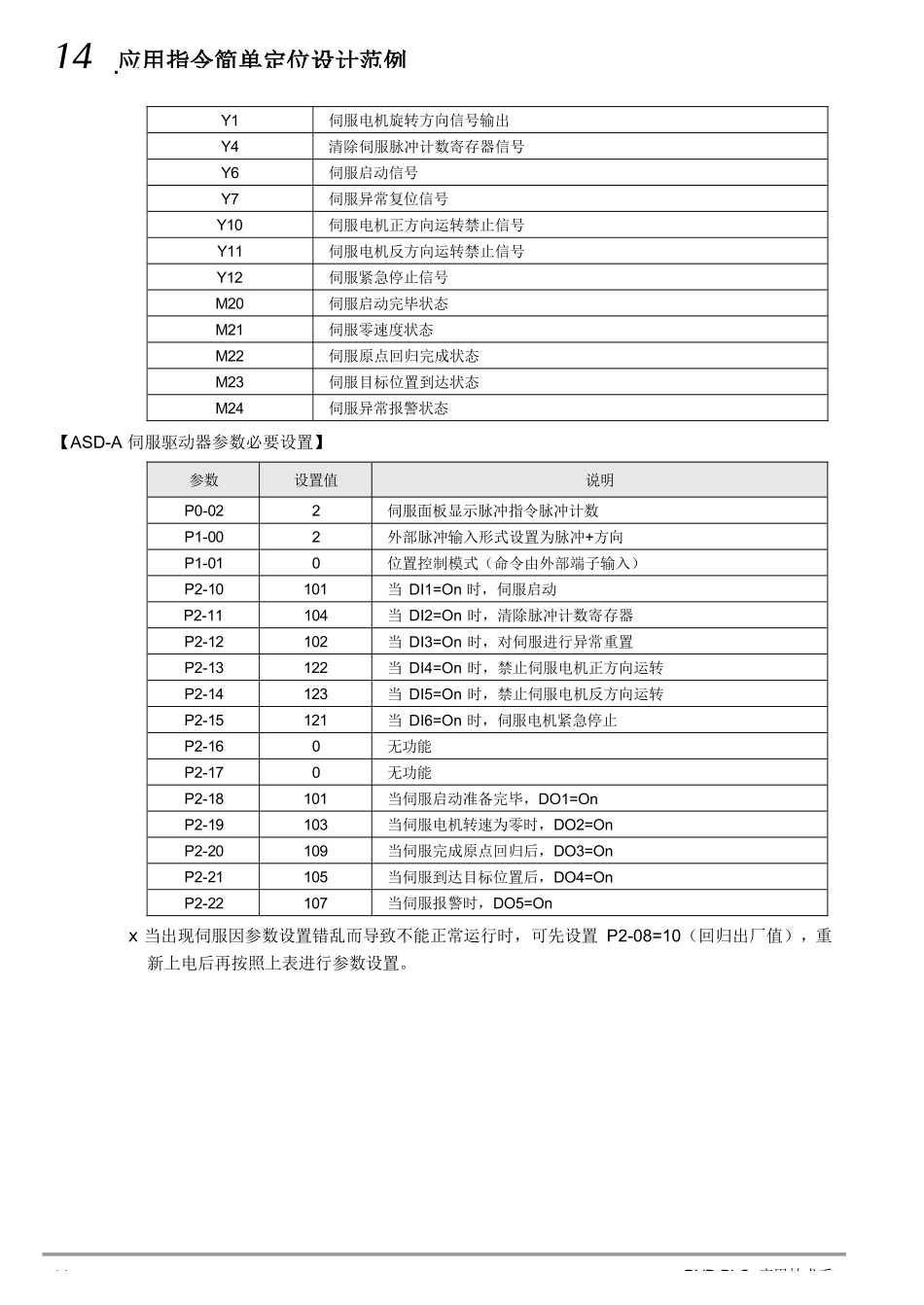
【元件说明】PLC 软元件说明M0原点回归开关M1正转 10 圈开关M2反转 10 圈开关M3坐标 400000 开关M4坐标-50000 开关M10伺服启动开关M11伺服异常复位开关M12暂停输出开关(PLC 脉冲暂停输出)M13伺服紧急停止开关X0正转极限传感器X1反转极限传感器X2DOG(近点)信号传感器X3来自伺服的启动准备完毕信号(对应 M20)X4来自伺服的零速度检出信号(对应 M21)X5来自伺服的原点回归完成信号(对应 M22)X6来自伺服的目标位置到达信号(对应 M23)X7来自伺服的异常报警信号(对应 M24)Y0脉冲信号输出14 应用指令简单定位设计范 例 14-DVP-PLC 应用技术手Y1伺服电机旋转方向信号输出Y4清除伺服脉冲计数寄存器信号Y6伺服启动信号Y7伺服异常复位信号Y10伺服电机正方向运转禁止信号Y11伺服电机反方向运转禁止信号Y12伺服紧急停止信号M20伺服启动完毕状态M21伺服零速度状态M22伺服原点回归完成状态M23伺服目标位置到达状态M24伺服异常报警状态【ASD-A 伺服驱动器参数必要设置】参数设置值说明P0-022伺服面板显示脉冲指令脉冲计数P1-002外部脉冲输入形式设置为脉冲+方向P1-010位置控制模式(命令由外部端子输入)P2-10