基于 SVPWM 的永磁同步电机控制系统的仿真随着电动机在社会生产中的广泛应用,由于永磁同步电机具有结构简单、体积小、效率高、转矩电流比高、转动惯量低,易于散热及维护等优点,特别是随着永磁材料价格的下降、 材料的磁性能的提高、 以及新型的永磁材料的出现,在中小功率、高精度、高可靠性、宽调速围的伺服控制系统中,永磁同步电动机引起了众多研究与开发人员的青睐,其应用领域逐步推广, 尤其在航空航天、数控机床、加工中心、机器人等场合已获得广泛的应用
我国制作永磁电机永磁材料的稀土资源丰富,稀土资占全世界的80%以上,发展永磁电机具有广阔的前景
第一章永磁同步电机的矢量控制原理1
1 永磁同步电机控制中应用的坐标系交流电机的数学模型具有高阶次,多变量耦合,非线性等特征,难以直接应用于系统的设计和控制, 与直流电机单变量, 自然解耦和线性的数学模型相比较,交流电机显得异常复杂
因此需要通过适当的转换,将交流电机的控制变换为类似直流电机的控制将大大简化交流电机控制的复杂程度
永磁同步电机矢量控制的基本思想是把交流电机当成直流电机来控制,即模拟直流电机的控制特点进行永磁同步电机的控制
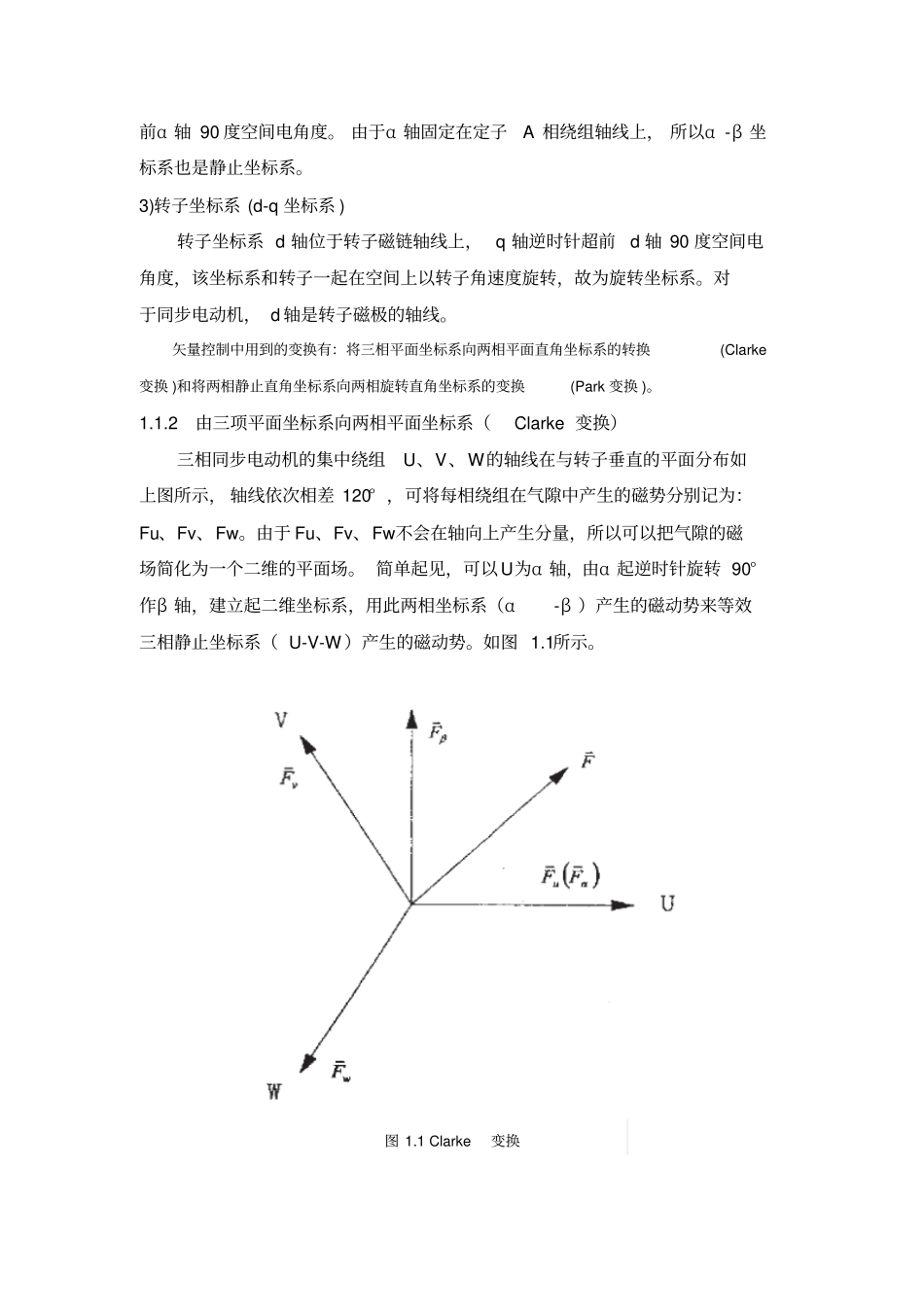
为简化感应电机模型,可将电机三相绕组电流产生的磁动势按平面矢量的叠加原理进行合成和分解,使得能够用两相正交绕组来等效实际电动机的三相绕组
由于两相绕组的正交性,变量之间的耦合大大减小
1 系统中的坐标系1)三相定子坐标系 (U-V-W 坐标系 ) 其中三相交流电机绕组轴线分别为U、V、W,彼此之间互差 120 度空间电角度,构成了一个U-V-W 三相坐标系
空间任意一矢量在三个坐标上的投影代表了该矢量在三个绕组上的分量
2)两相定子坐标系 (α -β 坐标系 ) 两相对称绕组通以两相对称电流也能产生旋转磁场
对于空间的任意一矢量,数学描述时习惯采用两相直角坐标系来描述,所以定义一个两相静止坐标系,即α