串口通信实验 一、实验目的 1
掌握 ARM 的串行口工作原理
学习编程实现 ARM 的 UART 通讯
掌握 CPU 利用串口通讯的方法
二、实验内容 学习串行通讯原理,了解串行通讯控制器,阅读 ARM 芯片文档,掌握 ARM 的 UART相关寄存器的功能,熟悉 ARM 系统硬件的 UART 相关接口
编程实现 ARM 和计算机实现串行通讯: ARM 监视串行口,将接收到的字符再发送给串口(计算机与开发板是通过超级终端通讯的),即按 PC 键盘通过超级终端发送数据,开发板将接收到的数据再返送给 PC,在超级终端上显示
三、实验原理介绍 通信方式 在通信过程中,如果通信仅在点对点之间进行,或者 点对多点之间进行,那么,按消息传输的方向和时间的不同,可以将通信分为单工通信、全双工通信以及半双工通信
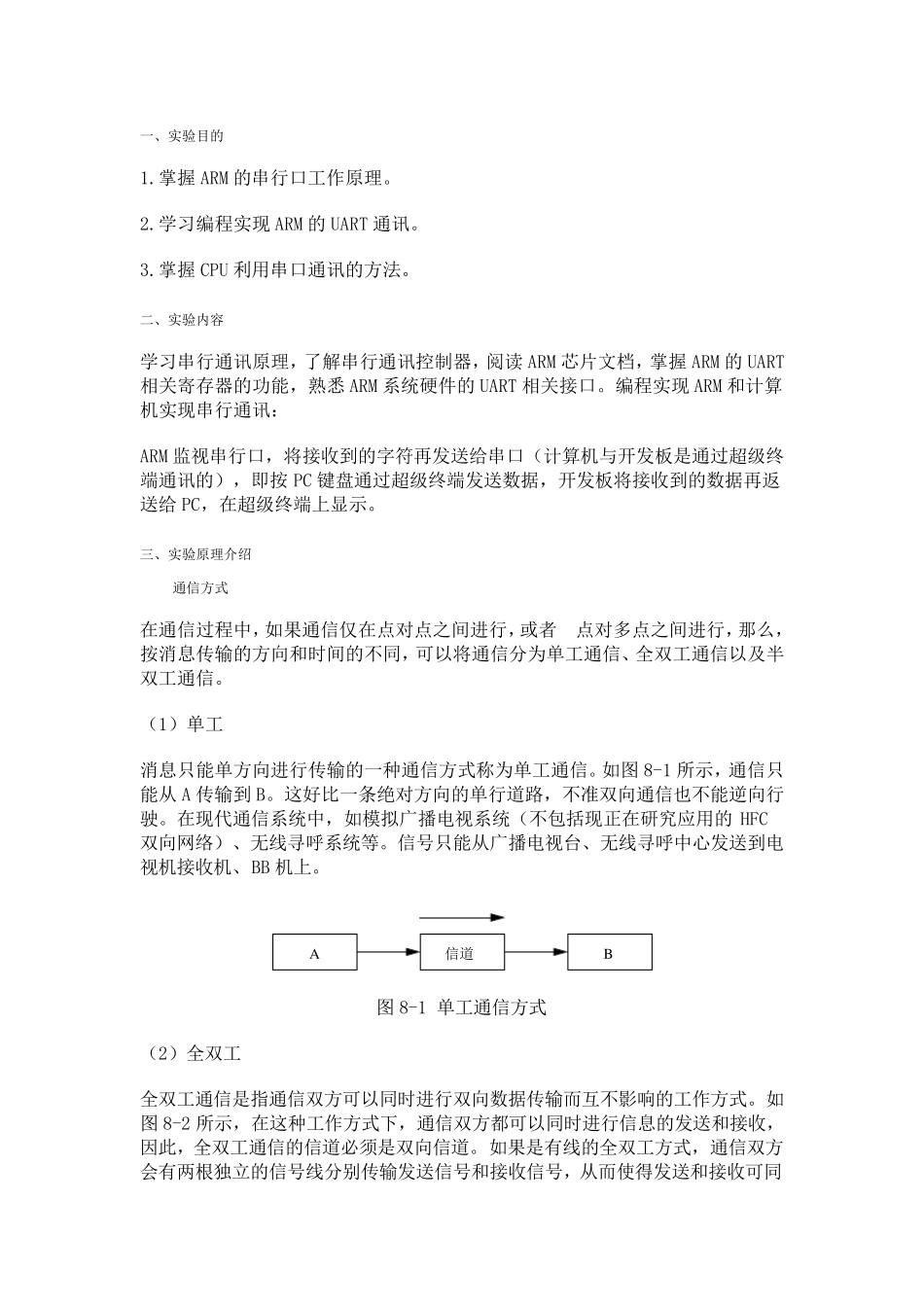
(1)单工 消息只能单方向进行传输的一种通信方式称为单工通信
如图8-1 所示,通信只能从A 传输到 B
这好比一条绝对方向的单行道路,不准双向通信也不能逆向行驶
在现代通信系统中,如模拟广播电视系统(不包括现正在研究应用的 HFC双向网络)、无 线 寻 呼 系统等
信号 只能从广播电视台 、无 线 寻 呼 中心 发送到电视机接收机、BB 机上
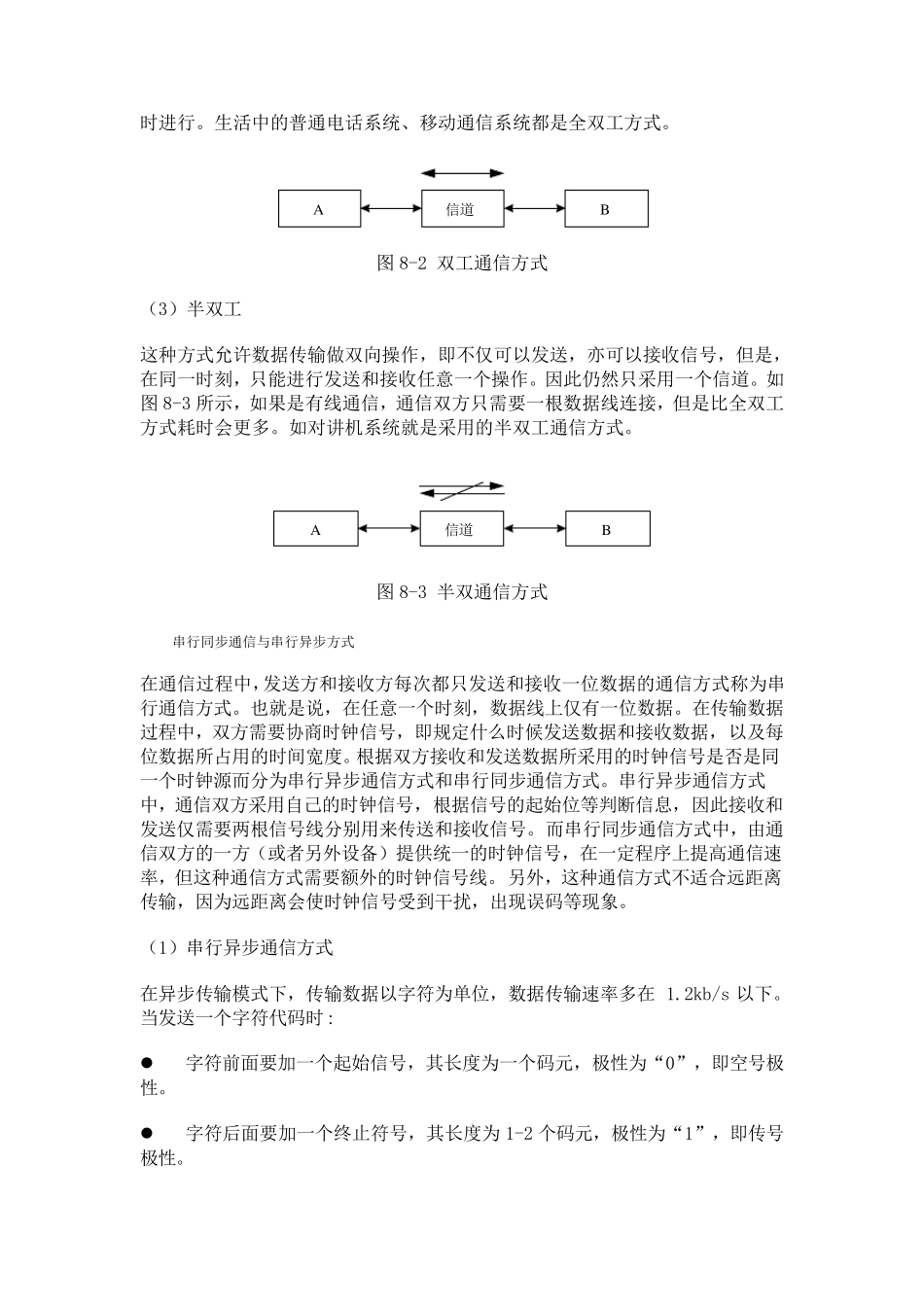
图8-1 单工通信方式 (2)全双工 全双工通信是指 通信双方可以同时进行双向数据传输而 互 不影 响 的工作方式
如图8-2 所示,在这种工作方式下 ,通信双方都 可以同时进行信息的发送和接收,因 此 ,全双工通信的信道必 须 是双向信道
如果是有 线 的全双工方式,通信双方会 有 两 根 独 立 的信号 线 分别 传输发送信号 和接收信号 ,从而 使 得 发送和接收可同信道AB时 进 行
生 活 中 的 普 通 电 话 系 统 、 移 动 通 信 系 统 都 是 全 双 工 方 式
图 8-2 双 工 通