Simulink 仿真集成环境简介 Simulink 是可视化动态系统仿真环境
1990 年正式由Mathw orks 公司引入到MATLAB中,它是Slmutation 和 Link 的结合
目前介绍Simulink 的资料有很多,这里主要介绍它的基本使用方法和它在控制系统仿真分析和设计操作的有关内容
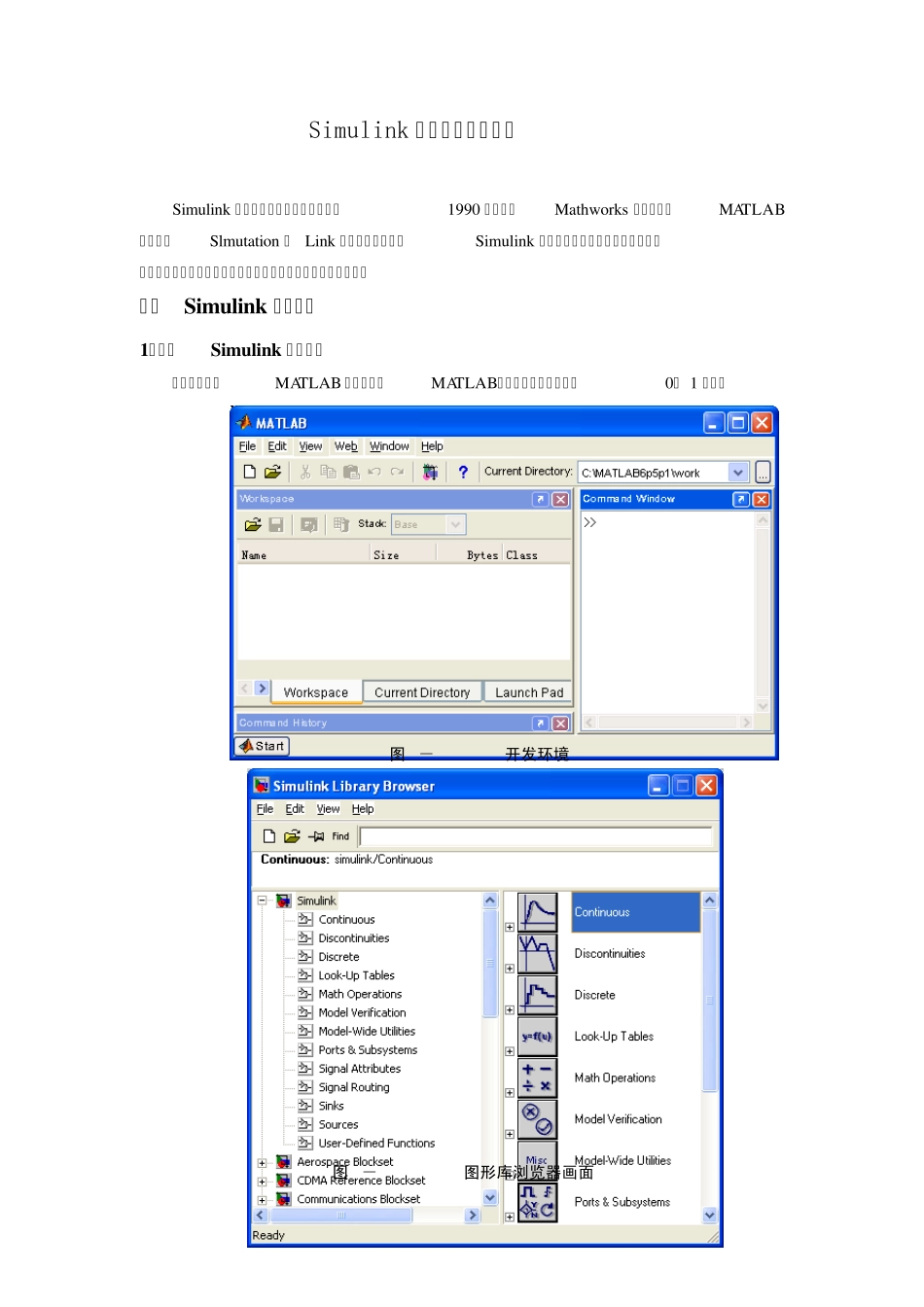
一、Simulink 基本操作 1.进入Simulink 操作环境 双击桌面上的MATLAB 图标,启动MATLAB,进入开发环境,如图0- 1 所示
图0-1 MATLAB开发环境 图0-2 Simulink图形库浏览器画面 从MATLAB 的桌面操作环境画面进入Simulink 操作环境有多种方法,介绍如下
①点击工具栏的Simulink 图标弹出如图0-2 的图形库浏览器画面
②在命令窗口键入“simulink”命令,可自动弹出图形库浏览器
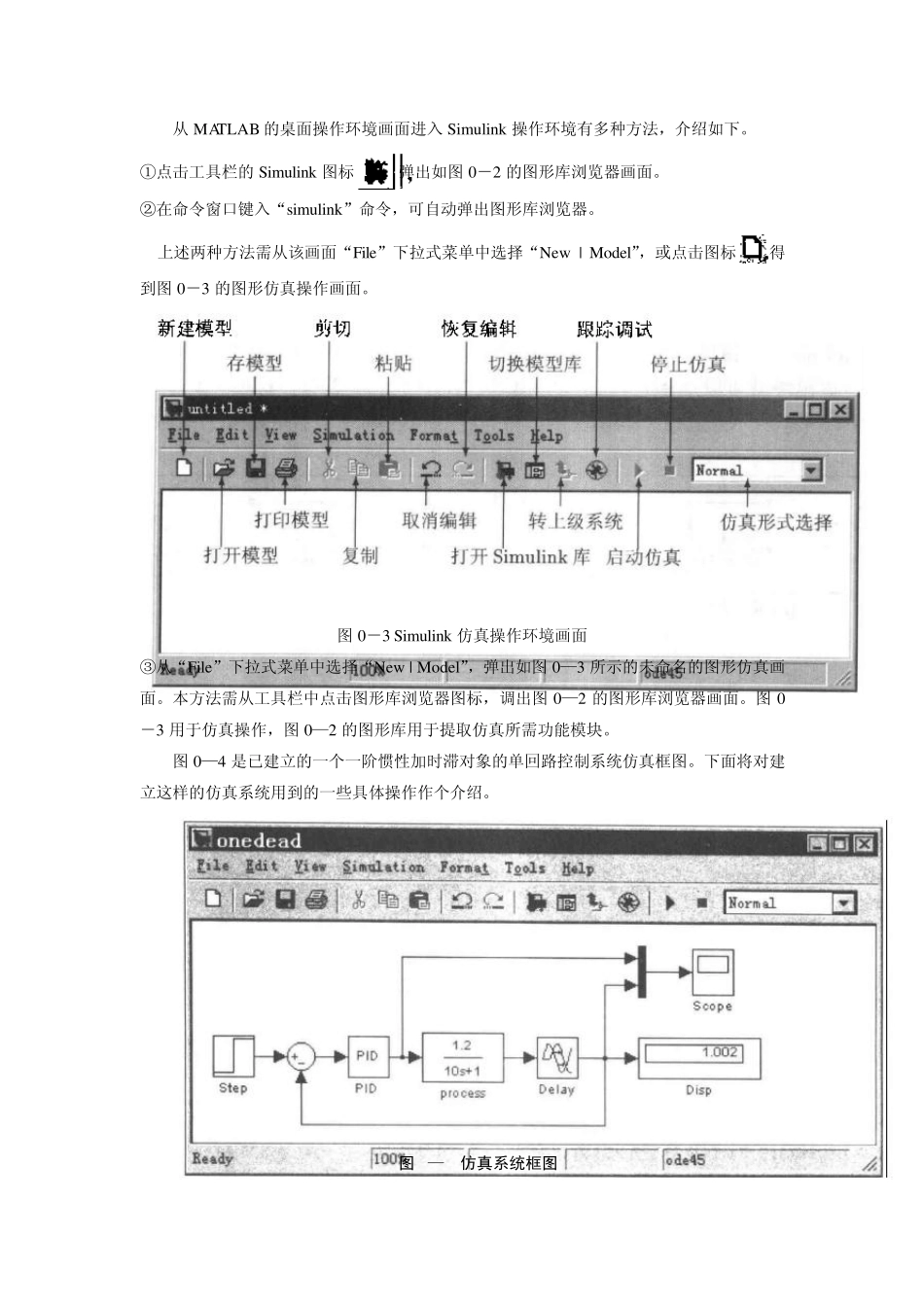
上述两种方法需从该画面“File”下拉式菜单中选择“New | Model”,或点击图标,得到图0-3 的图形仿真操作画面
图0-3 Simulink 仿真操作环境画面 ③从“File”下拉式菜单中选择“New | Model”,弹出如图0—3 所示的未命名的图形仿真画面
本方法需从工具栏中点击图形库浏览器图标,调出图0—2 的图形库浏览器画面
图0-3 用于仿真操作,图0—2 的图形库用于提取仿真所需功能模块
图0—4 是已建立的一个一阶惯性加时滞对象的单回路控制系统仿真框图
下面将对建立这样的仿真系统用到的一些具体操作作个介绍
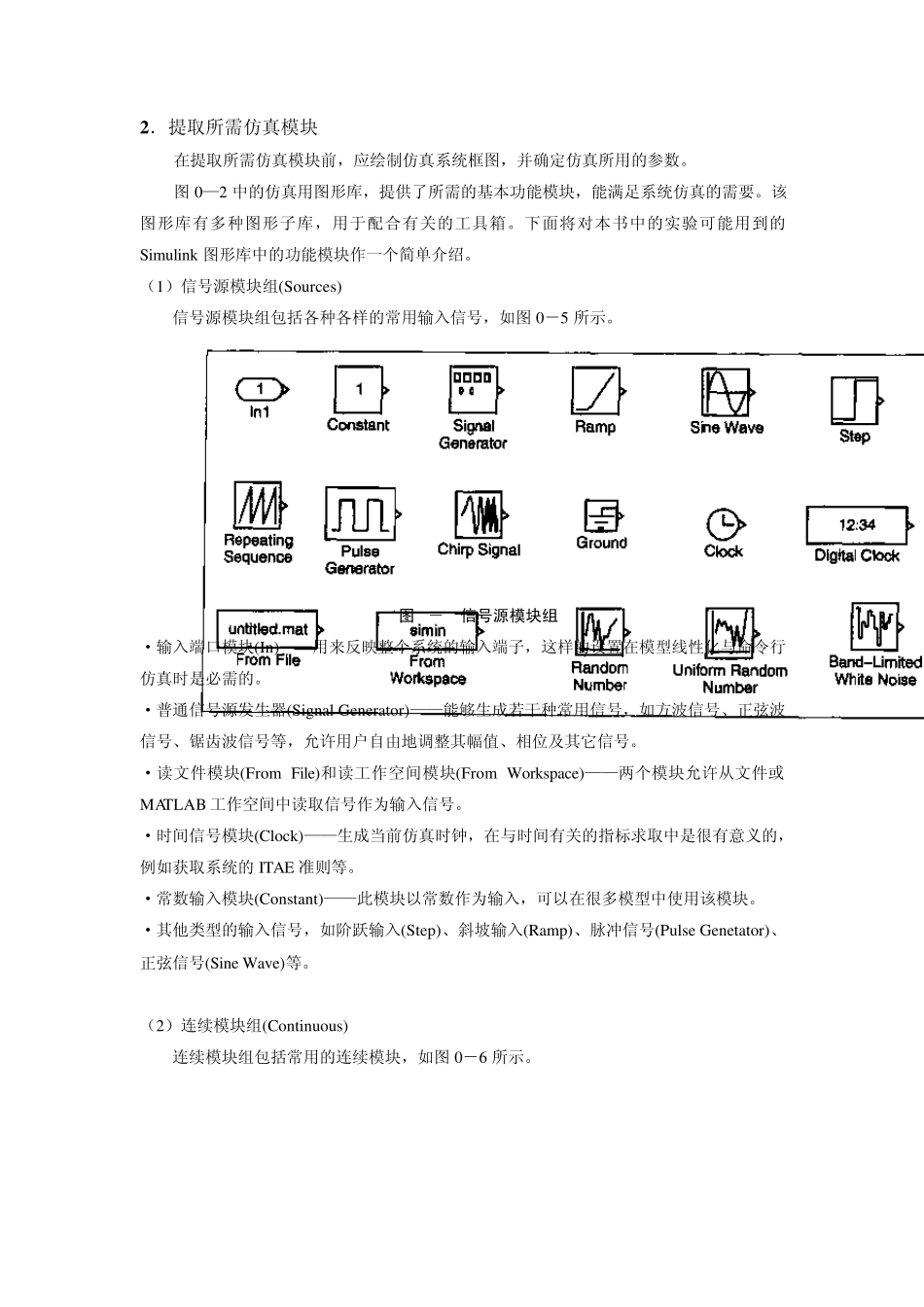
图0—4 仿真系统框图 2 .提取所需仿真模块 在提取所需仿真模块前,应绘制仿真系统框图,并确定仿真所用的参数
图0—2 中的仿真用图形库,提供了所需的基本功能模块,能满足系统仿真的需要
该图形库有多种图形子库,用于配合有关的工具箱
下面将对本书中的实验可能用到的Simu link 图