4 记录和整理实验报告
图像降质的数学模型 图像复原处理的关键问题在于建立退化模型
输入图像f(x, y)经过某个退化系统后输出的是一幅退化的图像
为了讨论方便, 把噪声引起的退化即噪声对图像的影响一般作为加性噪声 考虑, 这也与许多实际应用情况一致,如图像数字化时的量化 噪声、 随机噪声等就可以作为加性噪声,即使不是加性噪声而 是乘性噪声, 也可以用对数方式将其转化为相加形式
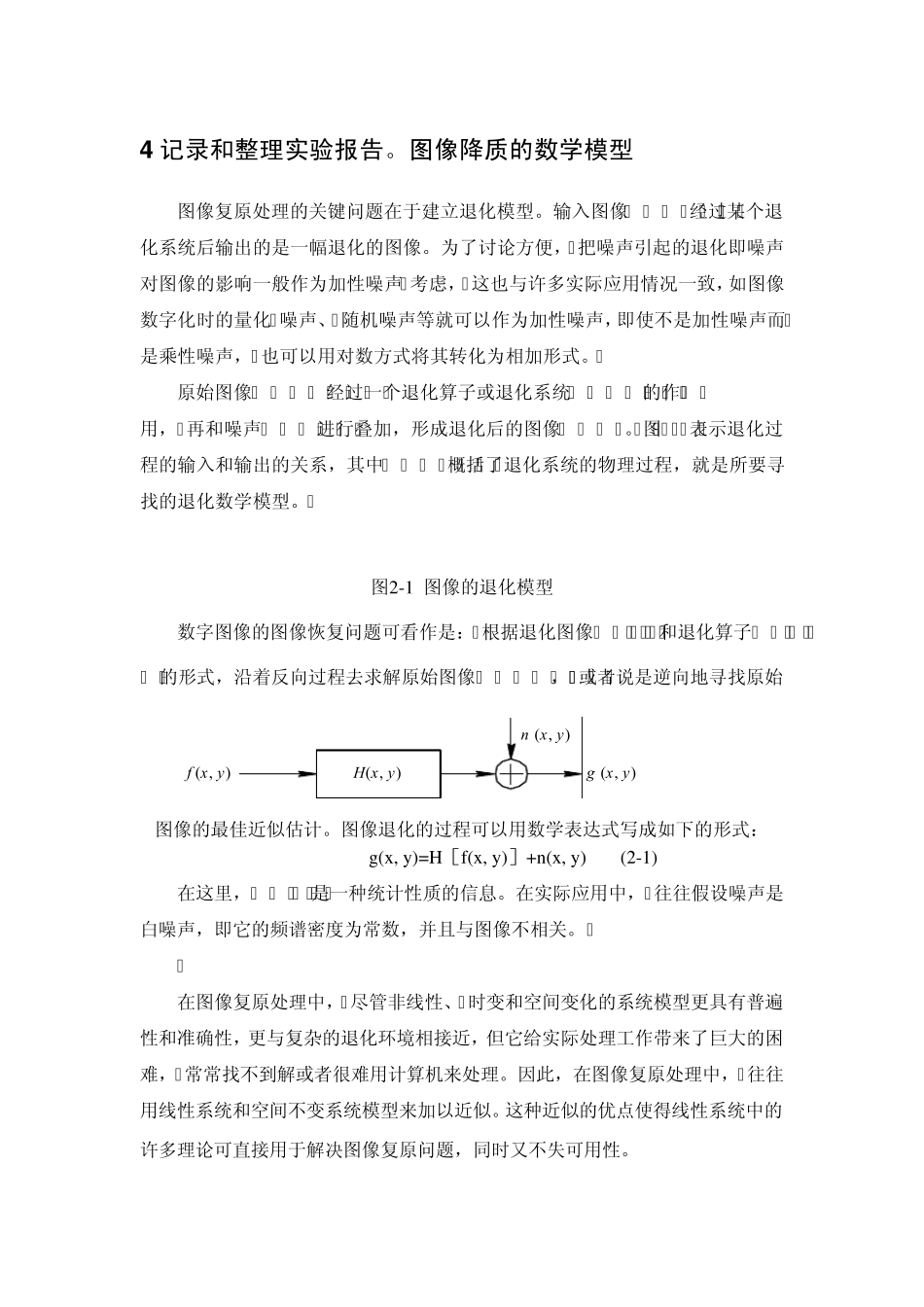
原始图像f(x, y) 经过一个退化算子或退化系统H(x, y) 的作 用, 再和噪声n(x,y)进行叠加,形成退化后的图像g(x, y)
图2-1表示退化过程的输入和输出的关系,其中H(x, y)概括了退化系统的物理过程,就是所要寻找的退化数学模型
图2-1 图像的退化模型 数字图像的图像恢复问题可看作是: 根据退化图像g(x , y)和退化算子H(x , y)的形式,沿着反向过程去求解原始图像f(x , y), 或者说是逆向地寻找原始图像的最佳近似估计
图像退化的过程可以用数学表达式写成如下的形式: g (x , y )=H[f(x , y )]+n (x , y ) (2-1) 在这里,n(x, y)是一种统计性质的信息
在实际应用中, 往往假设噪声是白噪声,即它的频谱密度为常数,并且与图像不相关
在图像复原处理中, 尽管非线性、 时变和空间变化的系统模型更具有普遍性和准确性,更与复杂的退化环境相接近,但它给实际处理工作带来了巨大的困难, 常常找不到解或者很难用计算机来处理
因此,在图像复原处理中, 往往用线性系统和空间不变系统模型来加以近似
这种近似的优点使得线性系统中的许多理论可直接用于解决图像复原问题,同时又不失可用性
H(x, y)f (x, y)g (x, y)n (x, y) 2
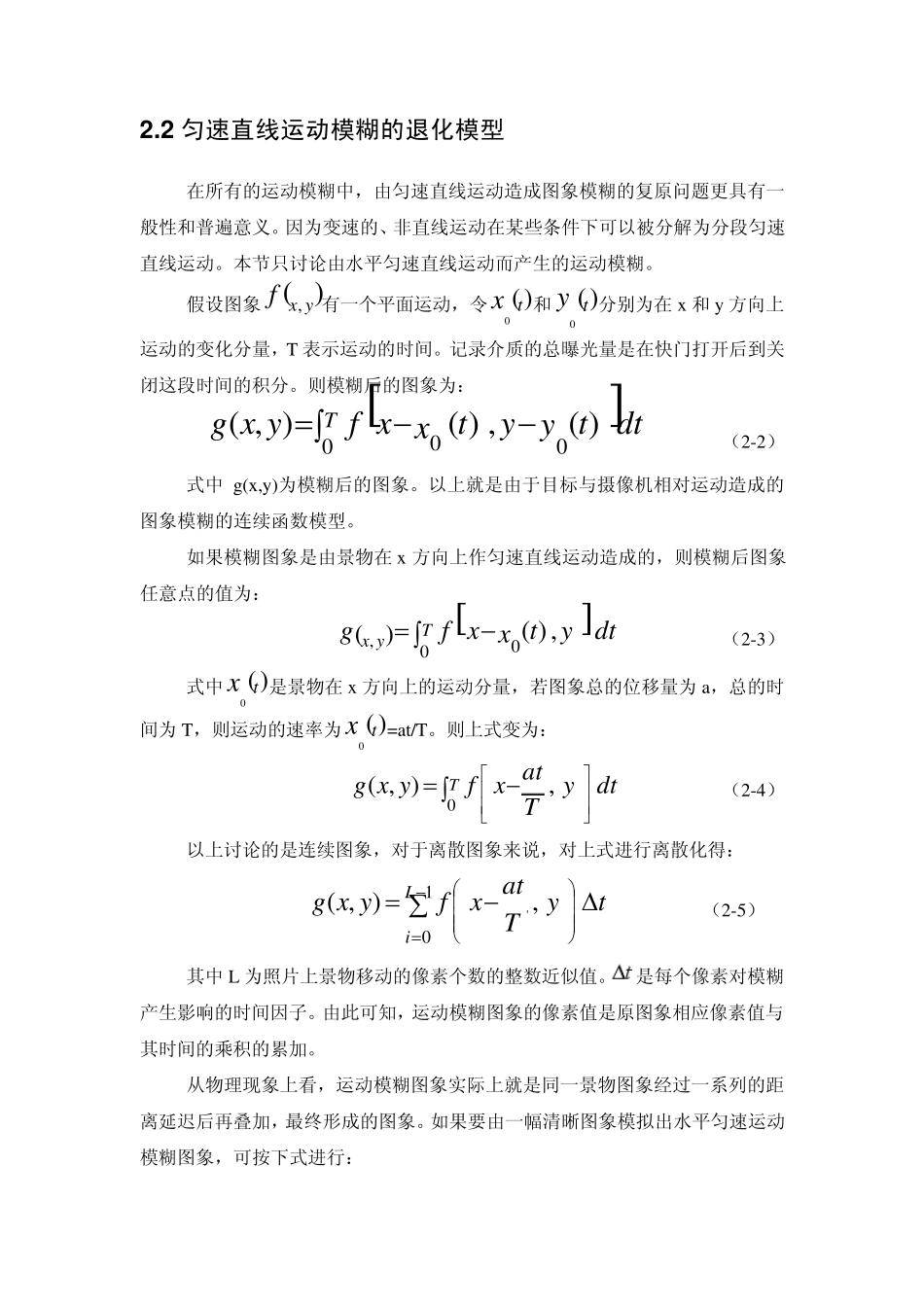
2 匀速直线运动模糊的退化模型 在所有的运动模糊中,由匀速直线运动造成图象模糊的复原问