地图匹配算法综述 1 地图匹配算法综述 一、地图匹配:现有算法 车辆导航系统实时接收 GPS 位置速度信息,以交通地图为背景显示车辆行驶轨迹
保证所显示的轨迹反映车辆的实际行驶过程,包括行驶路段,转弯过程及当前位置,就是地图匹配问题所要解决的目标
本节首先对地图匹配问题涉及到的基础概念、误差模型给出简要说明,同时介绍当前流行的一些地图匹配算法的思路与特点
1 地图匹配问题介绍 利用车载 GPS 接收机实时获得车辆轨迹,进而确定其在交通矢量地图道路上的位置,是当前车载导航系统的基础
独立 GPS 车载导航系统中克服 GPS 误差以及地图误差显示车辆在道路网上的位置主要是通过地图匹配算法,也就是根据 GPS 信号中的数据和地图道路网信息,利用几何方法、概率统计方法、模式识别或者人工神经网路等技术将车辆位置匹配到地图道路上的相应位置[8-12]
由于行驶中的车辆绝大部分都是在道路上的,所以通常的地图算法都有一个车辆在道路上的默认前提
地图匹配的准确性决定了 GPS 车辆导航系统的准确性、实时性与可靠性
具体来说取决于两方面:确定当前车辆正在行驶的路段的准确性与确定车辆在行驶路段上的位置的准确性
前者是现有算法的研究重点,而后者涉及到沿道路方向的误差校正,在现有算法中还没有得以有效解决
地图匹配的目标是将轨迹匹配到道路上,当道路是准确的时,也就成了确定 GPS 的准确位置,然后利用垂直映射方法完成匹配
要实时获得车辆所在的道路及位置通过地图匹配来实现是一种比较普遍而且成本较低的方法
车辆导航与定位系统中的地图匹配问题概括来讲就是将车载 GPS 接收机获得的带有误差的 GPS 轨迹位置匹配到带有误差的交通矢量地图道路上的相应位置
下面我们通过具体的数学模型地图匹配算法综述 2 来给地图匹配问题以详细的数学描述
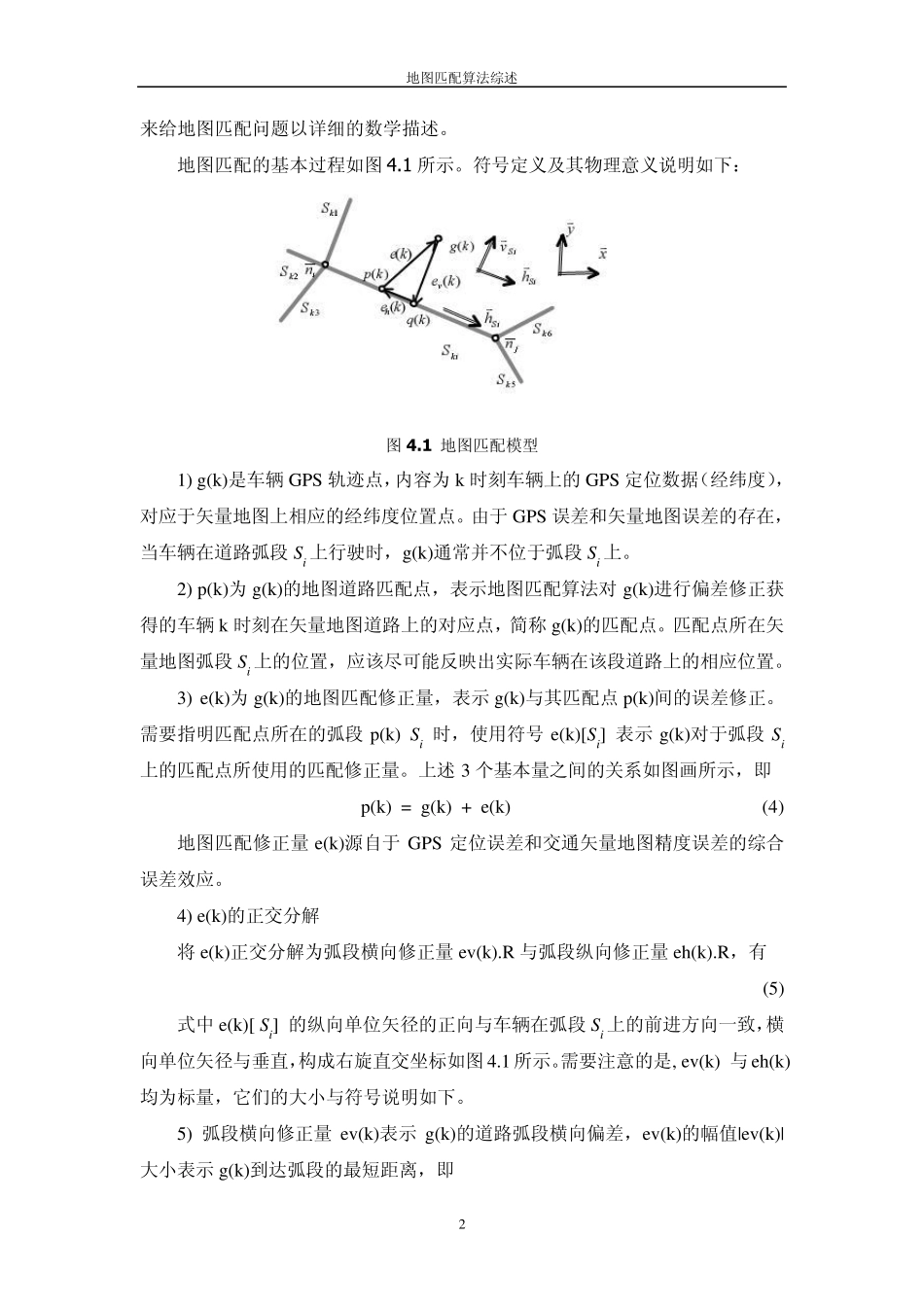
地图匹配的基本过程如图4
符号定义及其物理意义说明如下