伺服电机技术解答 三相交流永磁同步伺服电机简称交流伺服电机(AC server motor)或伺服电机,由于它具有高响应、高精度、运行平稳、恒转矩输出、能过载、低噪声、结构简介、可靠性高、免维护等优点,是目前旋转电机中最佳的控制电机
本章以EDB 驱动器和其配套伺服电机为例,简述伺服电机在应用中的有关问题及注意事宜,其原则和方法同样适用于其它型号的驱动器配伺服电机
伺服电机选型: 伺服电机的选型是多个因素综合考虑、合理选择的过程,一般应着重注意这几个参数的选择:电机的额定转矩、电机运行的最高转速、负载惯量及电机转子惯量、加减速时所需要的过载能力、电机起停频率等
通过机械传动机构加在电机上的负载有二种,即负载转矩和负载惯量
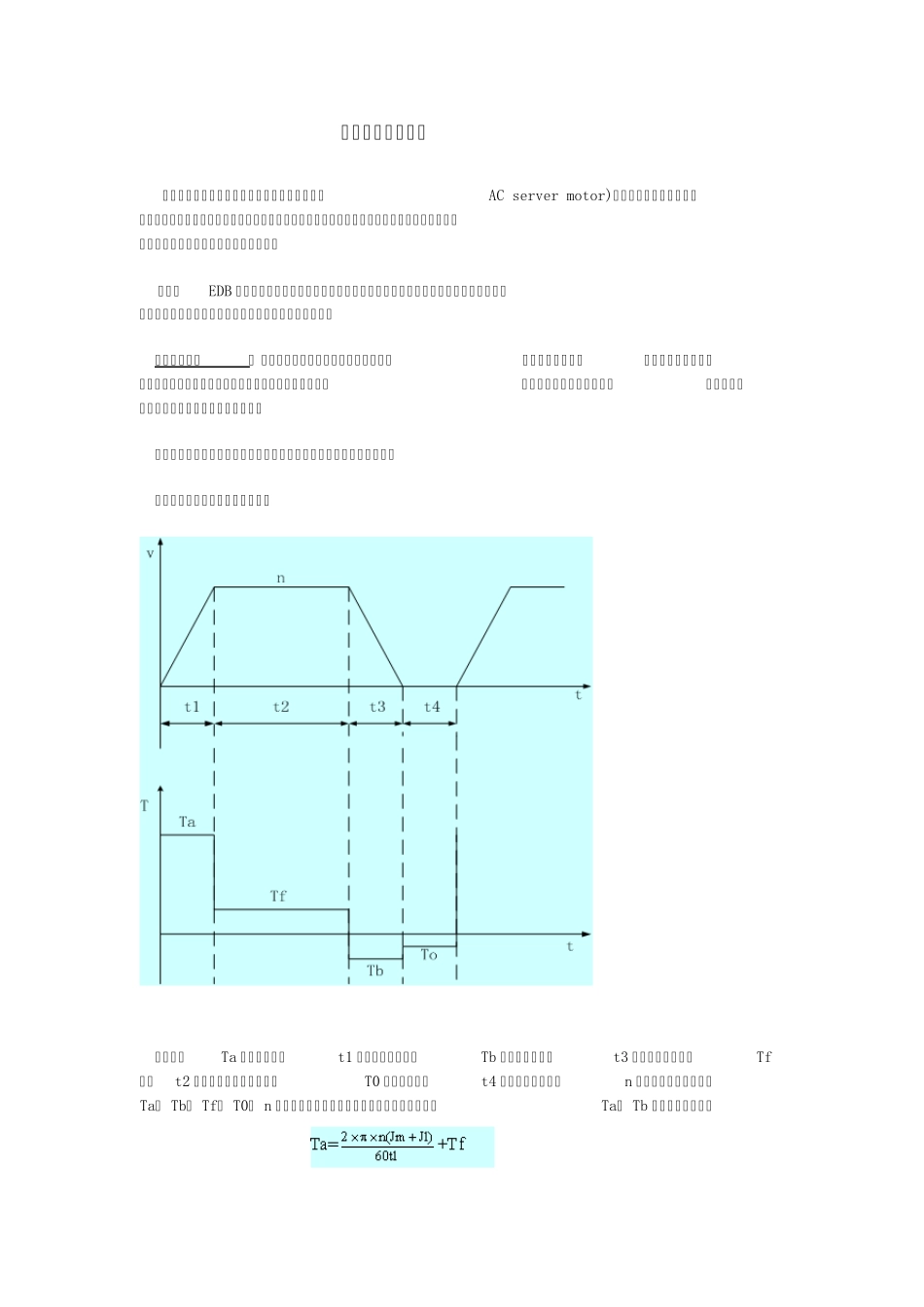
负载转矩如由下图运动方式形成: 则:图中Ta 为因加速时间t1 形成的加速转矩,Tb 为由于减速时间t3 形成的制动转矩,Tf为在t2 时间内产生的负载转矩,T0 为在停止时间t4 产生的锁定转矩,n 为工作时电机的转速
Ta、 Tb、 Tf、 T0、 n 均为通过机械传动装置折算到电机轴上的参数
Ta、 Tb 可参见下式确定: 式中:Jm—电机转子惯量(),Jl—折算到电机轴上的负载惯量(),t 单位:sec, n 单位:rpm, Ta、 Tf 单位:Nm
由下式确定一个周期电机转矩的均方根值: 确定预选电机的额定转矩大于Trms 值; 确定预选电机的额定转速大于实际运行的最高转转速;其过载转矩大于Ta、 Tb 中最大值,即可选定伺服电机
加在电机轴上的负载惯量,对伺服电机的灵敏度及快速移动、精确定位有很大的影响
较大的负载惯量,当指令速度发生变化时,电机达到指令速度的时间会较长;多轴同时运动时,会使形成的轨迹偏离指令轨迹过大,造成较大的误差
所以,选择机械传动机械,使折算到电机轴上的负载惯量合适,是伺服电机选型中重要的过程
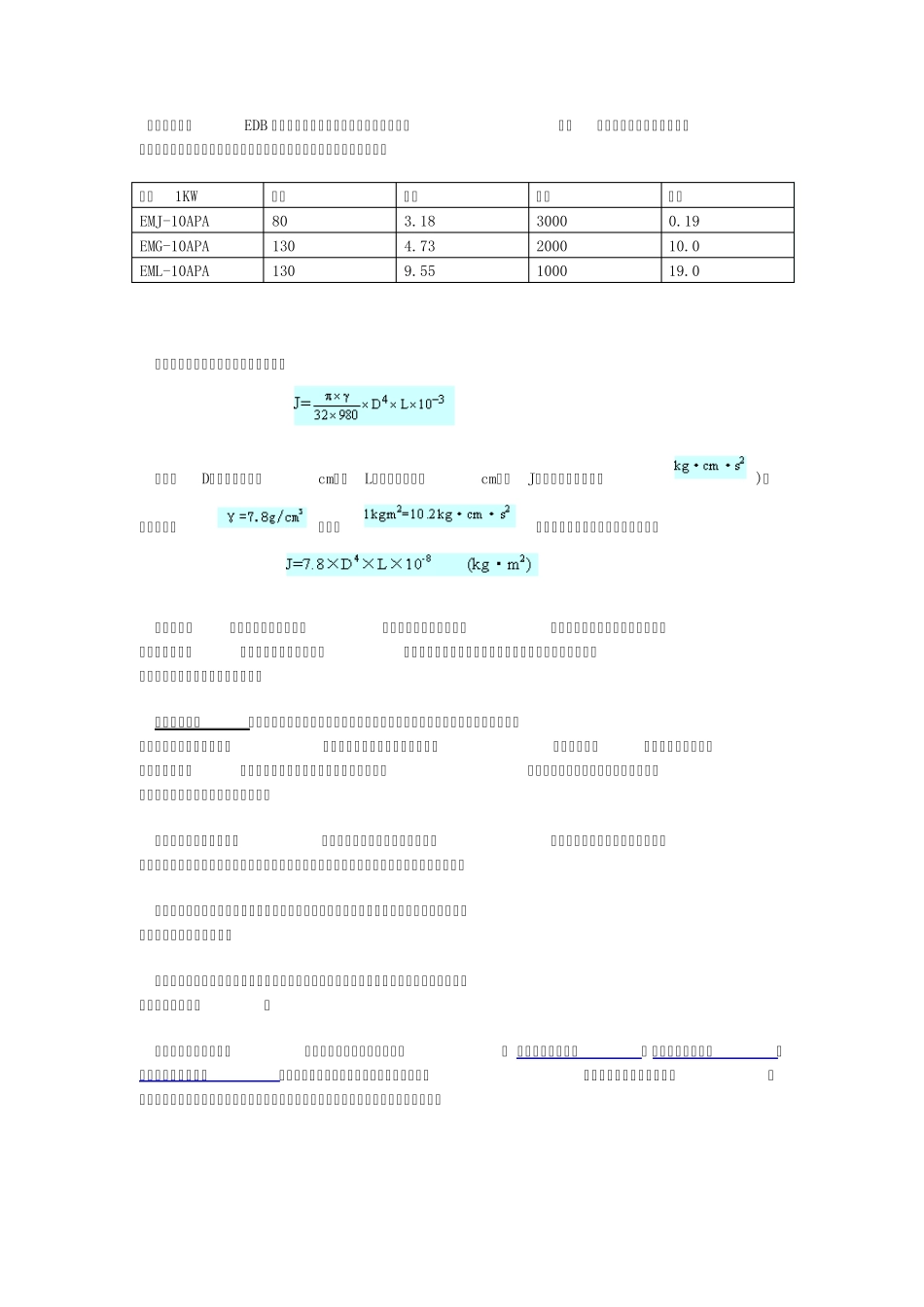
机械传动不仅要满