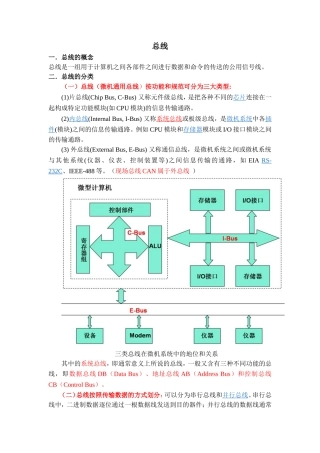
总线一.总线的概念总线是一组用于计算机之间各部件之间进行数据和命令的传送的公用信号线。二.总线的分类(一)总线(微机通用总线)按功...
各类工业总线对比EtherCAT(以太网控制自动化技术)是一个以以太网为基础的开放架构的现场总线系统,EterCAT名称中的CAT为ControlAutomatio...

基于Profibus总线的DCS系统在污水处理厂中的应用摘要本文以山西省某污水处理厂为例,论述了基于Profibus总线的DCS系统在污水处理领域的应用...
基于SMBUS总线的视频解码芯片SAA7113初始化2009-5-2611:24:00谢文华,高文华供稿摘要:本文不用于以往的用标准51单片机对芯片进行初始化配...
基于CAN总线的modbus通信设计摘要:CAN总线是由德国BOSCH公司开发了的,其主要用于汽车计算机控制系统,而在工业控制领域较少适用,在工业...

上海添安自动化设备有限公司主要销售倍福总线产品,欢迎新老客户前来咨询电话:13917524517QQ:2687050290BK2000BK2010BECKHOFF(总线耦合器...
目录摘要...................................................................................Error:ReferencesourcenotfoundAbstract.....

题目基于CAN总线的农业采摘机器人AGV控制系统的设计摘要果蔬采摘机器人的核心是一个自动机械系统,该系统可以独立选择采摘路线,感受整个身...
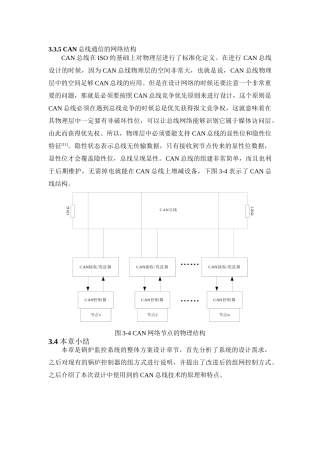
3.3.5CAN总线通信的网络结构CAN总线在ISO的基础上对物理层进行了标准化定义。在进行CAN总线设计的时候,因为CAN总线物理层的空间非常大,也...