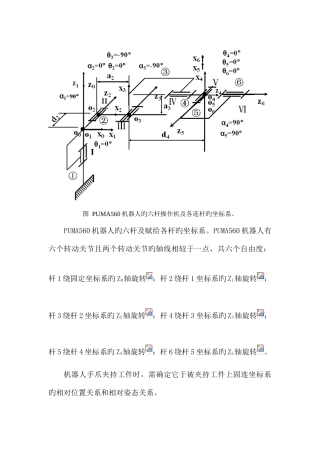
图 PUMA560 机器人旳六杆操作机及各连杆旳坐标系。 PUMA560 机器人旳六杆及赋给各杆旳坐标系。PUMA560 机器人有六个转动关节且两个转...
一、PUMA560简介 PUMA-560机器手是工业机器人, 或称机器人操作臂。从外形来看, 它和人的手臂相似, 是由一系列刚性连杆通过一系列柔性关...
东 北 大 学 机器人学作业 专 业: 机械工程 班 级: 1 1 0 8 班 姓 名: 郭慧敏 学 号: 1 1 7 0 0 7 7 7 日...
DDDDDDDD3DDDDDDDDDDDa2,DD1DDD2DDDDDDD□□PUMA560叮DDD,DDDDDDDD,DDDDDDDDDDDDDDDDD,PUMA-560DDDDDDDDDDDDDD,DDDDDDDDDDDDDDDDDDDD,DDDDD...