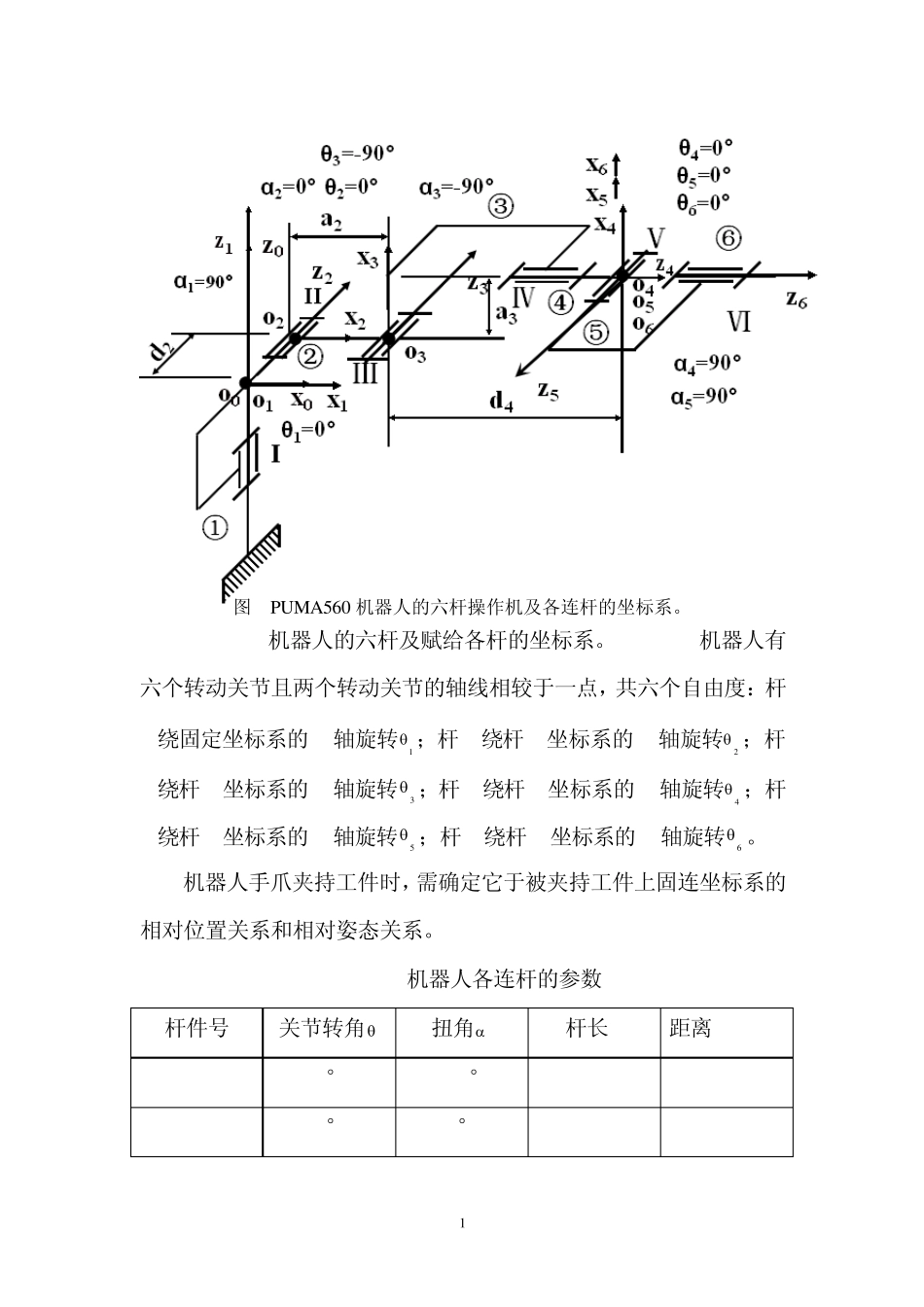
东 北 大 学 机器人学作业 专 业: 机械工程 班 级: 1 1 0 8 班 姓 名: 郭慧敏 学 号: 1 1 7 0 0 7 7 7 日 期: 2 0 1 1 -1 1 -2 4 1 图 PU MA560 机器人的六杆操作机及各连杆的坐标系
PUMA560机器人的六杆及赋给各杆的坐标系
PUMA560机器人有六个转动关节且两个转动关节的轴线相较于一点,共六个自由度:杆1绕固定坐标系的Z0轴旋转1 ;杆2绕杆1坐标系的Z1轴旋转2 ;杆3绕杆2坐标系的Z2轴旋转3 ;杆4绕杆3坐标系的Z3轴旋转4 ;杆5绕杆4坐标系的Z4轴旋转5 ;杆6绕杆5坐标系的Z5轴旋转6
机器人手爪夹持工件时,需确定它于被夹持工件上固连坐标系的相对位置关系和相对姿态关系
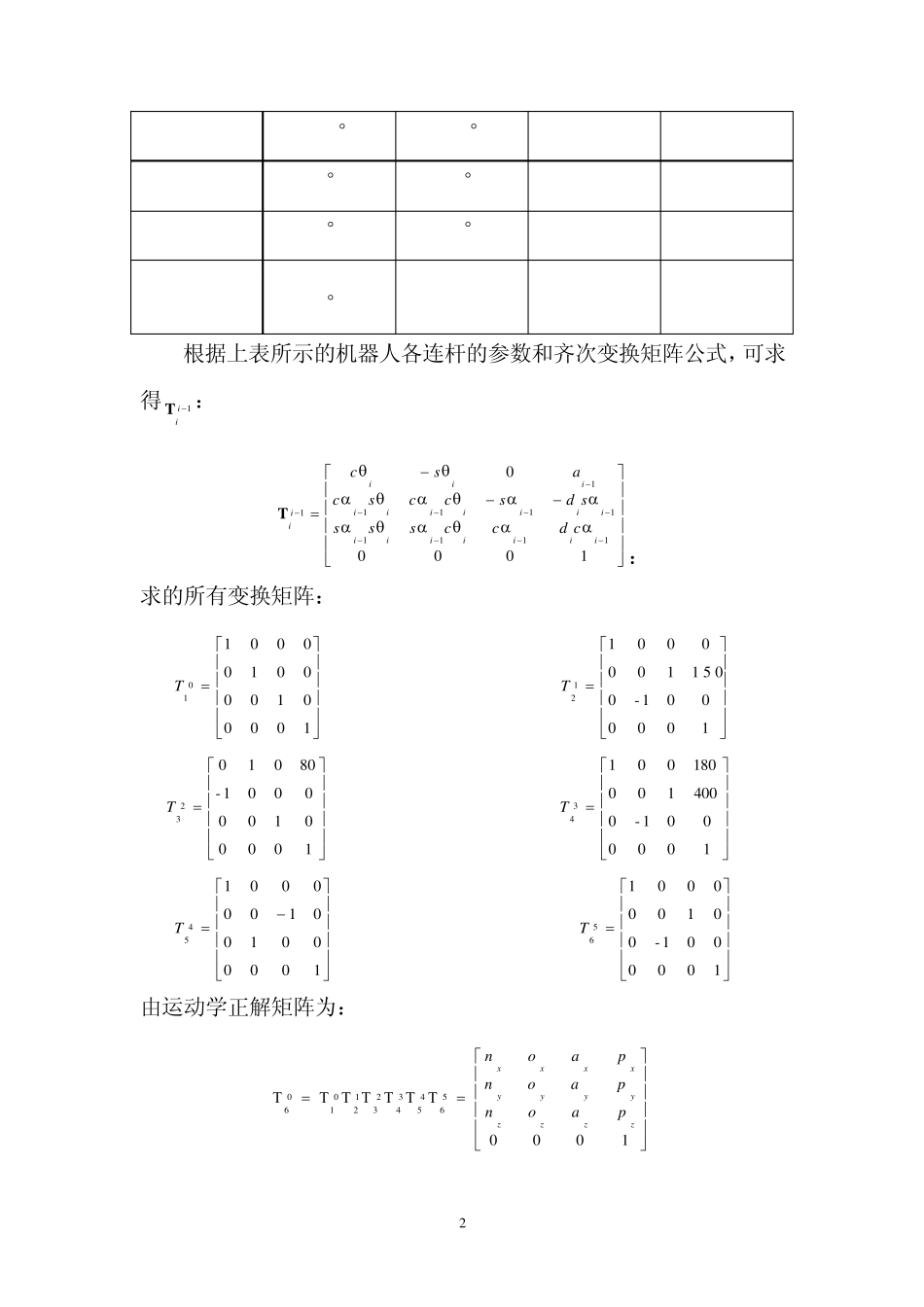
PUMA560机器人各连杆的参数 杆件号 关节转角 扭角 杆长a 距离d 1 0° -90° 0 0 2 0° 0° 80 150 2 3 -90° -90° 180 0 4 0° 90° 0 400 5 0° 90° 0 0 6 0° 0 根据上表所示的机器人各连杆的参数和齐次变换矩阵公式,可求得1iiT: 100001111111111iiiiiiiiiiiiiiiiiiicdccssssdsccscascT: 求的所有变换矩阵: 100001000010000101T 1000001-01 5 0100000112T 100001000001-8 001023T 1000001-04 0 01001 8 000134T 100000100100000145T 1