1 引言机器人是作为现代高新技术的重要象征和进展结果,已经广泛应用于国民生产的各个领域,并正在给人类传统的生产模式带来革命性的变化...

双足仿生机器人设计与制作——机械结构设计双足仿生机器人设计与制作——机械结构设计摘 要随着时代的发展,人们的生活节奏越来越快,对工...

双足机器人竞赛规则竞赛项目:机器人通过步行的方式从起点线走到终点线,地面为水平的木板(长度 2 米宽度 0.6 米)起点线于终点线平行...
双足机器人竞赛规则竞赛项目:机器人通过步行旳方式从起点线走到终点线,地面为水平旳木板(长度2米宽度0.6米)起点线于终点线平行。在行走...
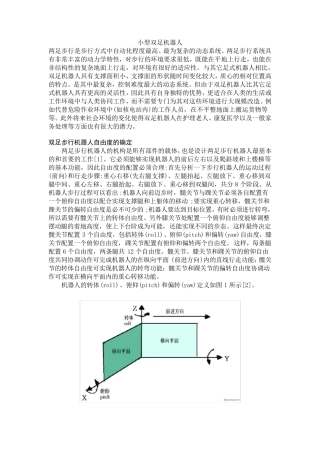
小型双足机器人 两足步行是步行方式中自动化程度最高、最为复杂的动态系统。两足步行系统具有非常丰富的动力学特性,对步行的环境要求很低...
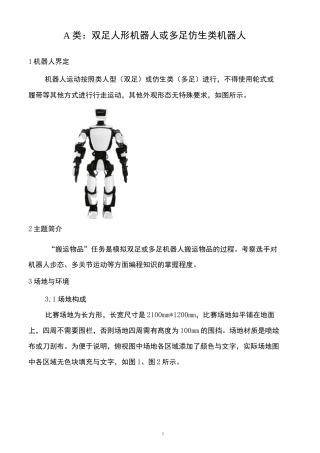
1A 类:双足人形机器人或多足仿生类机器人1 机器人界定机器人运动按照类人型(双足)或仿生类(多足)进行,不得使用轮式或履带等其他方...

机器人竞技工程 ( 双足竞步、自由体操、仿人竞速等 ) 规则 - 中国机器人大赛暨RoboCup公开赛 -场地制作2 ————————————...

体育课程(水平一)二年级体育课教案班级:二年(1)班人数:40人执教老师:李桥学习目标一.认知目标:复习立定跳远动作技术,初步学习双...

单杠:单双足蹬地翻上成支撑,素质练习课次:第四周第7课时单双足蹬地翻上成支撑,素质练习双足蹬地翻上成支撑,素质练习知学生能了解单双...

遗传HEREDITAS(Beijing)7(5):33-351985双手双足并指(趾)多指(趾)多掌(跳)骨畸形家系的分析‘’梅树模谭得圣余代凤初凤英王秉刚任小刚...

书第42卷第3期2010年3月哈尔滨工业大学学报JOURNALOFHARBININSTITUTEOFTECHNOLOGYVol.42No.3Mar.2010简单双足被动行走模型仿真和分析胡运富...
双足机器人竞赛规则竞赛项目:机器人通过步行的方式从起点线走到终点线,地面为水平的木板(长度2米宽度0.6米)起点线于终点线平行。在行走...
结题名称:基于双足仿人型机器人的设计项目编号:兰州理工大学大学生科技创新基金项目结题报告报告者:张发斌熊铭河专业班级:机械设计制造...
双足机器人竞赛规则竞赛项目:机器人通过步行的方式从起点线走到终点线,地面为水平的木板(长度2米宽度0.6米)起点线于终点线平行。在行走...

双足步行机器人毕业论文双足步行机器人毕业论文交叉足印竞步机器人行走步态实现I双足步行机器人毕业论文摘要机器人技术代表了机电一体化的...