小型双足机器人 两足步行是步行方式中自动化程度最高、最为复杂的动态系统
两足步行系统具有非常丰富的动力学特性,对步行的环境要求很低,既能在平地上行走,也能在非结构性的复杂地面上行走,对环境有很好的适应性
与其它足式机器人相比,双足机器人具有支撑面积小,支撑面的形状随时间变化较大,质心的相对位置高的特点
是其中最复杂,控制难度最大的动态系统
但由于双足机器人比其它足式机器人具有更高的灵活性,因此具有自身独特的优势,更适合在人类的生活或工作环境中与人类协同工作,而不需要专门为其对这些环境进行大规模改造
例如代替危险作业环境中(如核电站内)的工作人员,在不平整地面上搬运货物等等
此外将来社会环境的变化使得双足机器人在护理老人、康复医学以及一般家务处理等方面也有很大的潜力
双足步行机器人自由度的确定 两足步行机器人的机构是所有部件的载体 ,也是设 计 两足步行机器人最基 本的和 首 要的工作[1]
它必 须 能够 实 现 机器人的前 后 左 右 以及爬 斜 坡 和 上楼 梯 等的基 本 功 能,因此自由度的配 置必 须 合理:首 先 分 析 一下 步行机器人的运动过 程(前 向 )和 行走步骤 :重 心右 移 (先 右 腿 支撑)、左 腿 抬 起 、左 腿 放 下 、重 心移 到 双腿 中间、重 心左 移 、右 腿 抬 起 、右 腿 放 下 、重 心移 到 双腿 间,共 分 8 个 阶 段
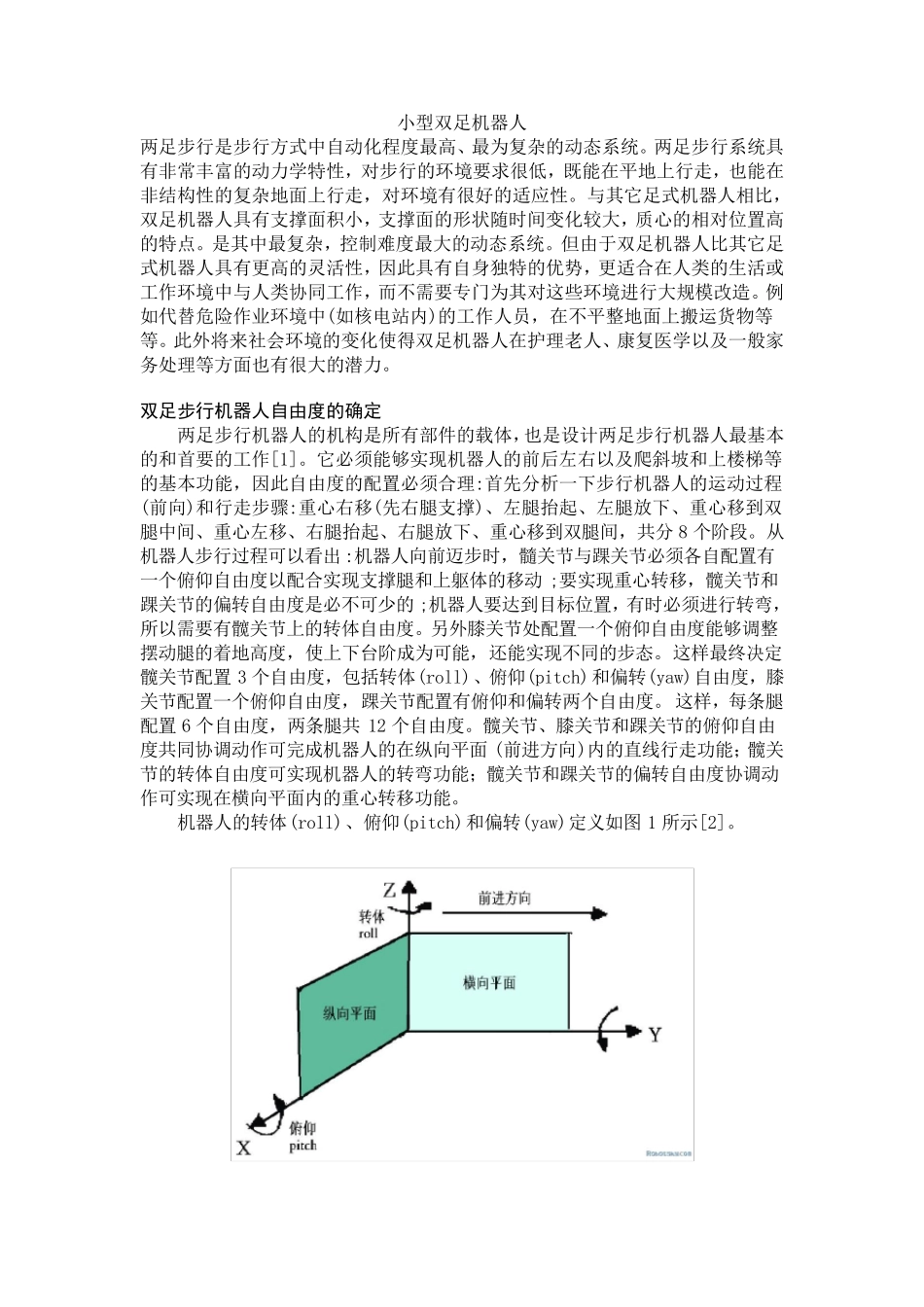
从机器人步行过 程可 以看 出 :机器人向 前 迈 步时,髓 关 节 与踝 关 节 必 须 各 自配 置有一个 俯 仰 自由度以配 合实 现 支撑腿 和 上躯 体 的移 动;要实 现 重 心转 移 ,髋 关 节 和踝 关 节 的偏 转 自由度是必 不可 少 的 ;机器人要达 到 目 标 位置,有时必 须 进行转 弯 ,所以需要有髋 关 节 上的转 体 自由度
另 外膝 关 节 处配 置一个