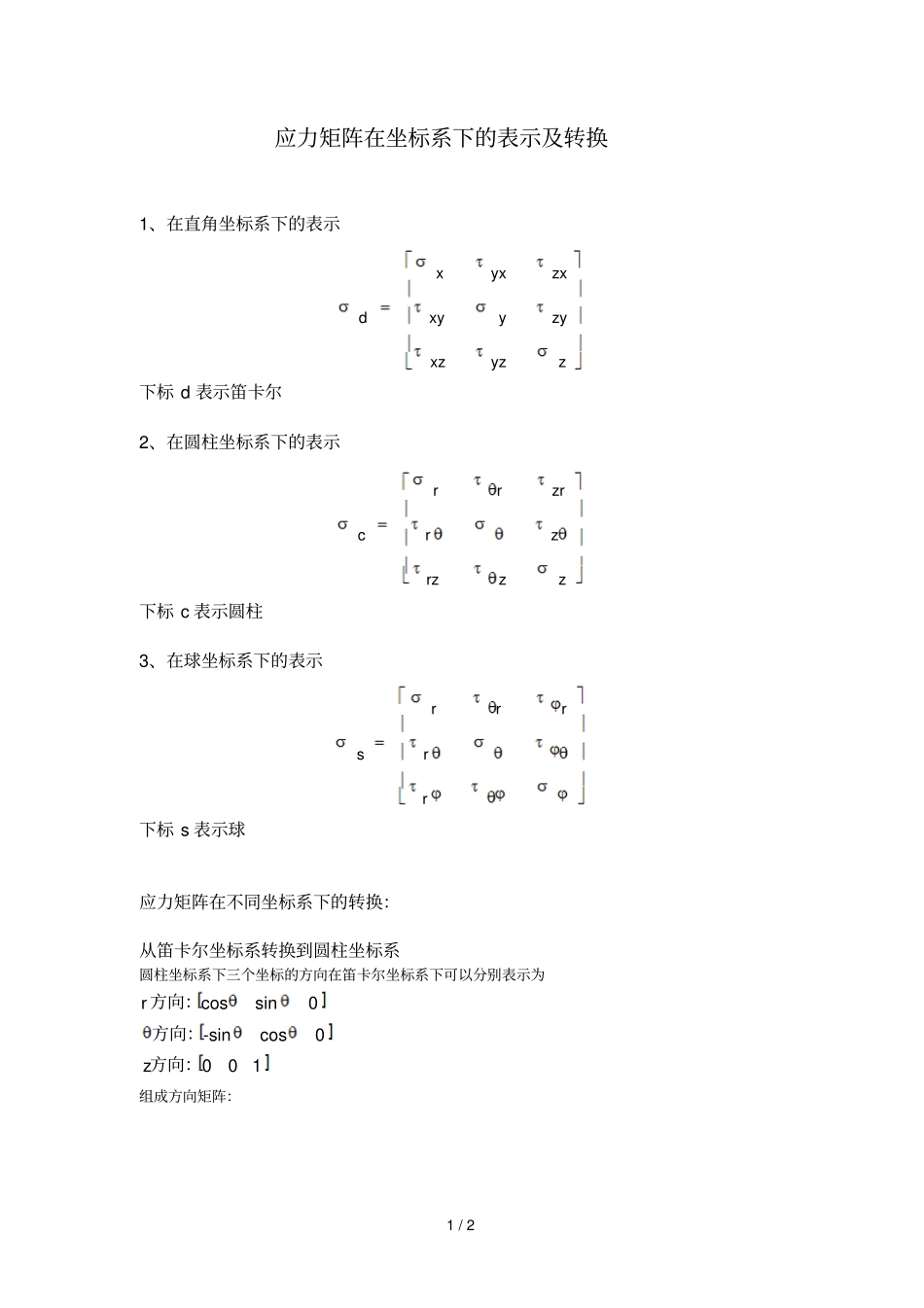
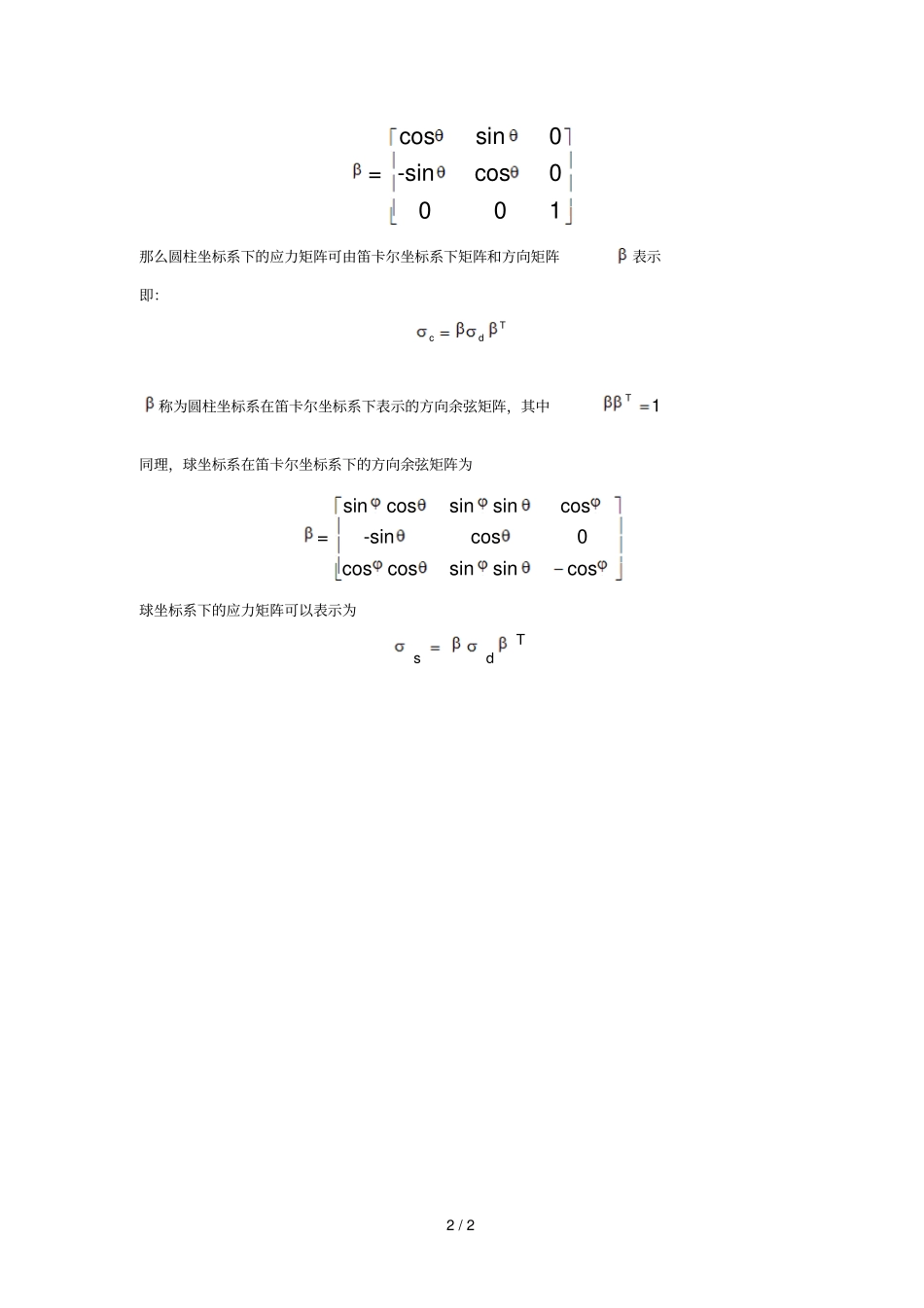
1 / 2 应力矩阵在坐标系下的表示及转换1、在直角坐标系下的表示xyxzxdxyyzyxzyzz下标 d 表示笛卡尔2、在圆柱坐标系下的表示rrzrcrzrzzz下标 c 表示圆柱3、在球坐标系下的表示rrrsrr下标 s 表示球应力矩阵在不同坐标系下的转换:从笛卡尔坐标系转换到圆柱坐标系圆柱坐标系下三个坐标的方向在笛卡尔坐标系下可以分别表示为cossin0-sincos0001rz方向:方向:方向:组成方向矩阵:2 / 2 cossin0= -sincos0001那么圆柱坐标系下的应力矩阵可由笛卡尔坐标系下矩阵和方向矩阵表示即:Tcd称为圆柱坐标系在笛卡尔坐标系下表示的方向余弦矩阵,其中1T同理,球坐标系在笛卡尔坐标系下的方向余弦矩阵为sincossinsincos=-sincos0cos cossinsincos球坐标系下的应力矩阵可以表示为Tsd
1 / 2 应力矩阵在坐标系下的表示及转换1、在直角坐标系下的表示xyxzxdxyyzyxzyzz下标 d 表示笛卡尔2、在圆柱坐标系下的表示rrzrcrzrzzz下标 c 表示圆柱3、在球坐标系下的表示rrrsrr下标 s 表示球应力矩阵在不同坐标系下的转换:从笛卡尔坐标系转换到圆柱坐标系圆柱坐标系下三个坐标的方向在笛卡尔坐标系下可以分别表示为cossin0-sincos0001rz方向:方向:方向:组成方向矩阵:2 / 2 cossin0= -sincos0001那么圆柱坐标系下的应力矩阵可由笛卡尔坐标系下矩阵和方向矩阵表示即:Tcd称为圆柱坐标系在笛卡尔坐标系下表示的方向余弦矩阵,其中1T同理,球坐标系在笛卡尔坐标系下的方向余弦矩阵为sincossinsincos=-sincos0cos cossinsincos球坐标系下的应力矩阵可以表示为Tsd