1 绪论 (1) 控制系统的组成 (2 ) 由系统工作原理图绘制方框图 被控对象 控制系统 测量元件 比较元件 控制装置 放大元件 执行机构 校正装置 给定元件 (3 ) 对控制系统的要求 (4 ) 控制系统的分类 (5 ) 负反馈原理 将系统的输出信号引回输入端,与输入信号相比较,利用所得的偏差信号进行控制,达到减小偏差、消除偏差的目的
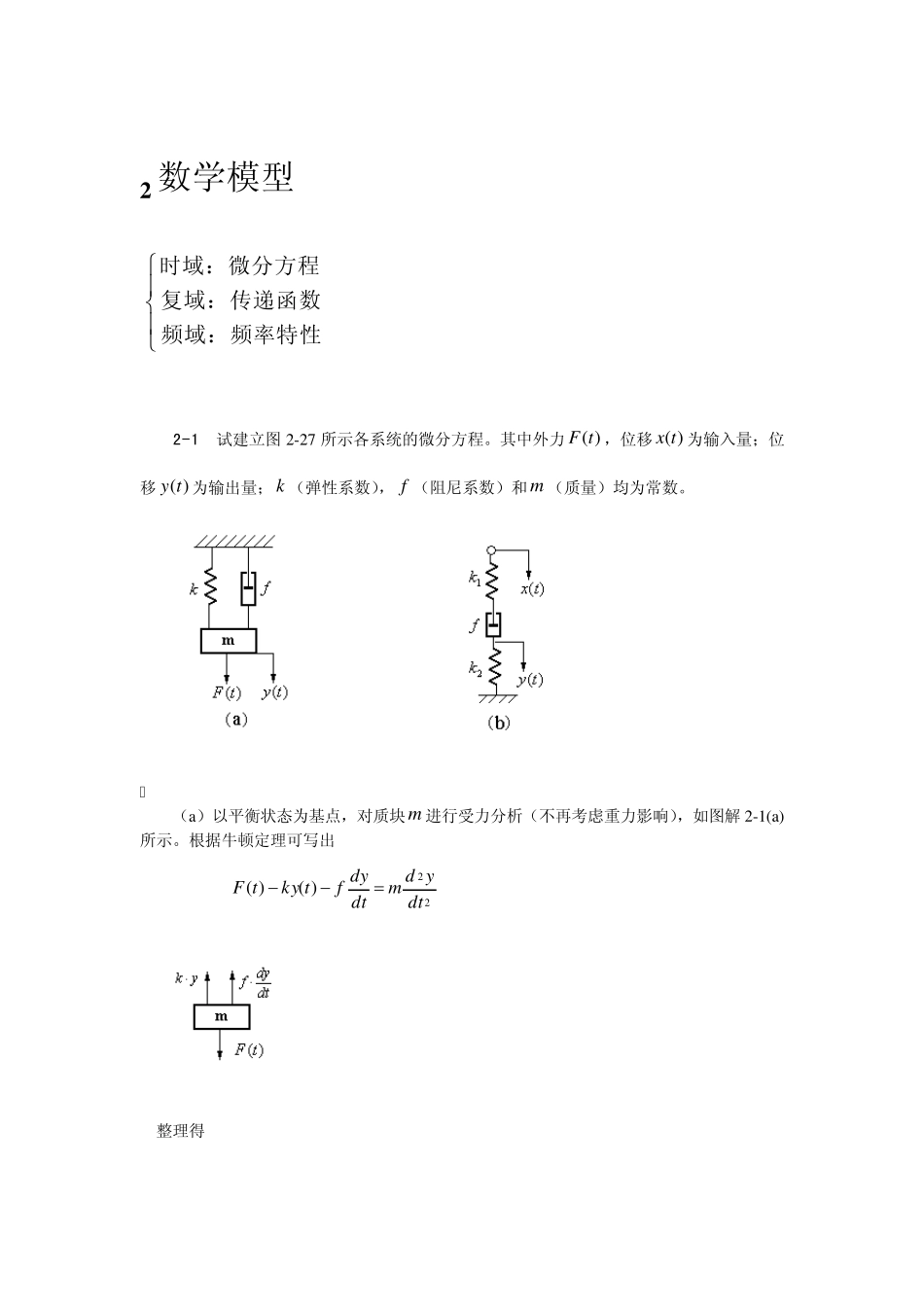
2 数学模型 频域:频率特性复域:传递函数时域:微分方程 2-1 试建立图2-27 所示各系统的微分方程
其中外力)(tF,位移)(tx为输入量;位移)(ty为输出量;k (弹性系数), f (阻尼系数)和m (质量)均为常数
解 (a)以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响),如图解 2-1(a)所示
根据牛顿定理可写出 22)()(dtydmdtdyftkytF 整理得 )(1)()()(22tFmtymkdttdymfdttyd ( b) 如图解2-1(b)所示,取A,B 两点分别进行受力分析
对A 点有 )()(111dtdydtdxfxxk (1) 对B 点有 ykdtdydtdxf21)( (2) 联立式(1)、(2)可得: dtdxkkkykkfkkdtdy2112121)( 2
1 拉氏变换的几个重要定理 (1)线性性质: )s(bF)s(aF)t(bf)t(afL2121 (2)微分定理: 0fsFstfL 例:求 tcosL 解:2222ssss1tnsiL1tcos (3)积分定理: 0fs1sFs1dttfL1- 零初始条件下有: sFs1dttfL 例:求L[t]=
解: dtt1t