机器人组装大赛设计方案
自动拾捡乒乓球机器人 通信10701 班 转载需与作者联系 自动拾捡乒乓球机器人方案设计 本次设计提出了以ATmega128 为核心控制元件,设计一个简易的拾捡乒乓球机器人
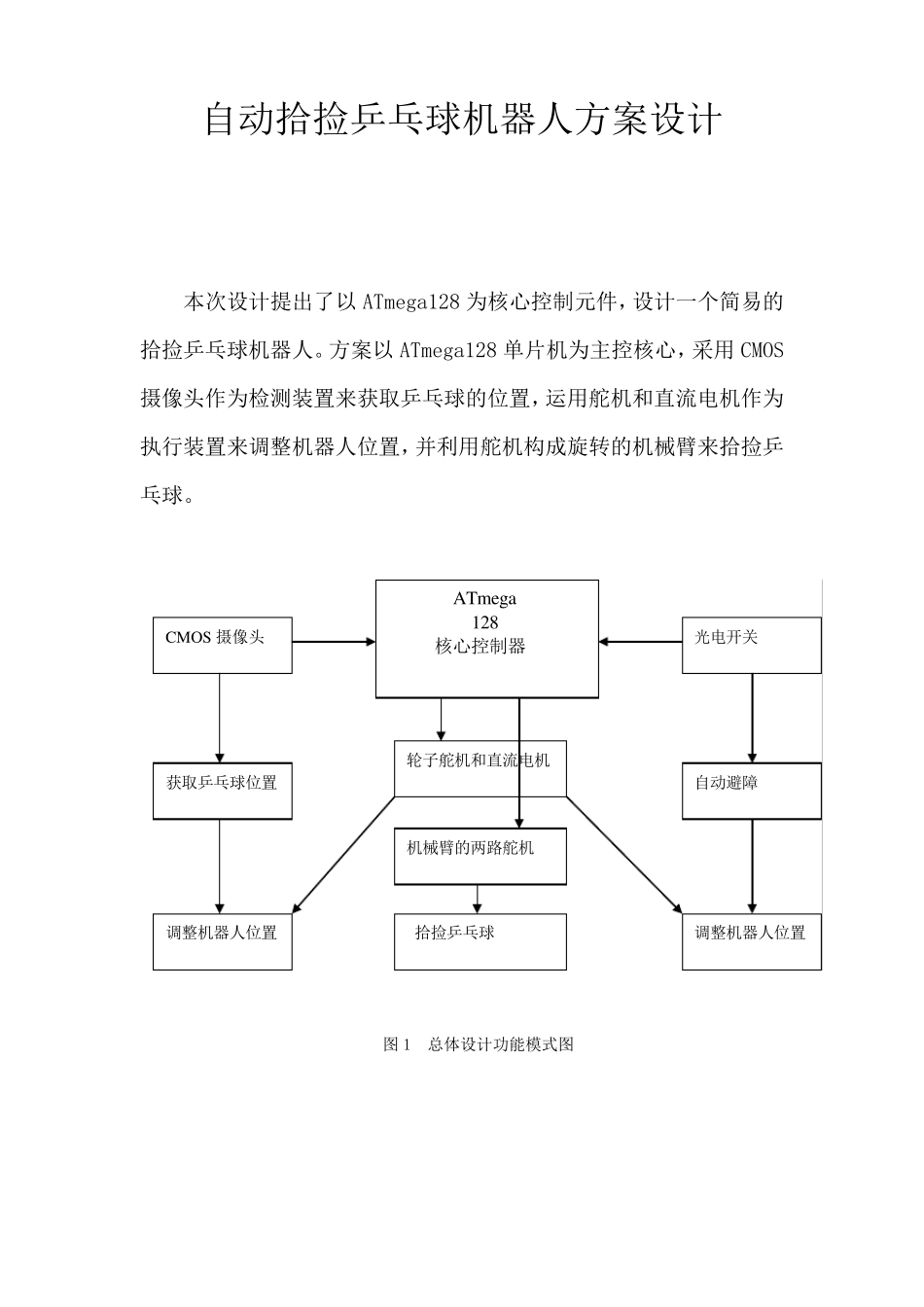
方案以ATmega128 单片机为主控核心,采用 CMOS摄像头作为检测装置来获取乒乓球的位置,运用舵机和直流电机作为执行装置来调整机器人位置,并利用舵机构成旋转的机械臂来拾捡乒乓球
图 1 总体设计功能模式图 CMOS 摄像头 ATm ega 128 核心控制器 机械臂的两路舵机 调整机器人位置 轮子舵机和直流电机 光电开关 调整机器人位置 拾捡乒乓球 自动避障 获取乒乓球位置 一、 总体方案设计思路 1
机器人动作设计:自动避障、拾捡乒乓球
机器人工作过程设计: (1)自动避障过程:机器人会通过两个光电开关来判断其前方是否有障碍物,如果有障碍物机器人会采取相应的策略自动避障,直到调整好位置
(2)其次通过 CMOS 摄像头采集机器人正前方的环境信息,判断乒乓球是否在机器人的正前方,如果乒乓球在正前方则返回信息给主控制卡,并启动机械臂拾捡乒乓球,接着再次开始检测,否则根据设定好的策略调整机器人的位置,左移、右移、前进或者后退,直到扫描完整个设定的移动区域
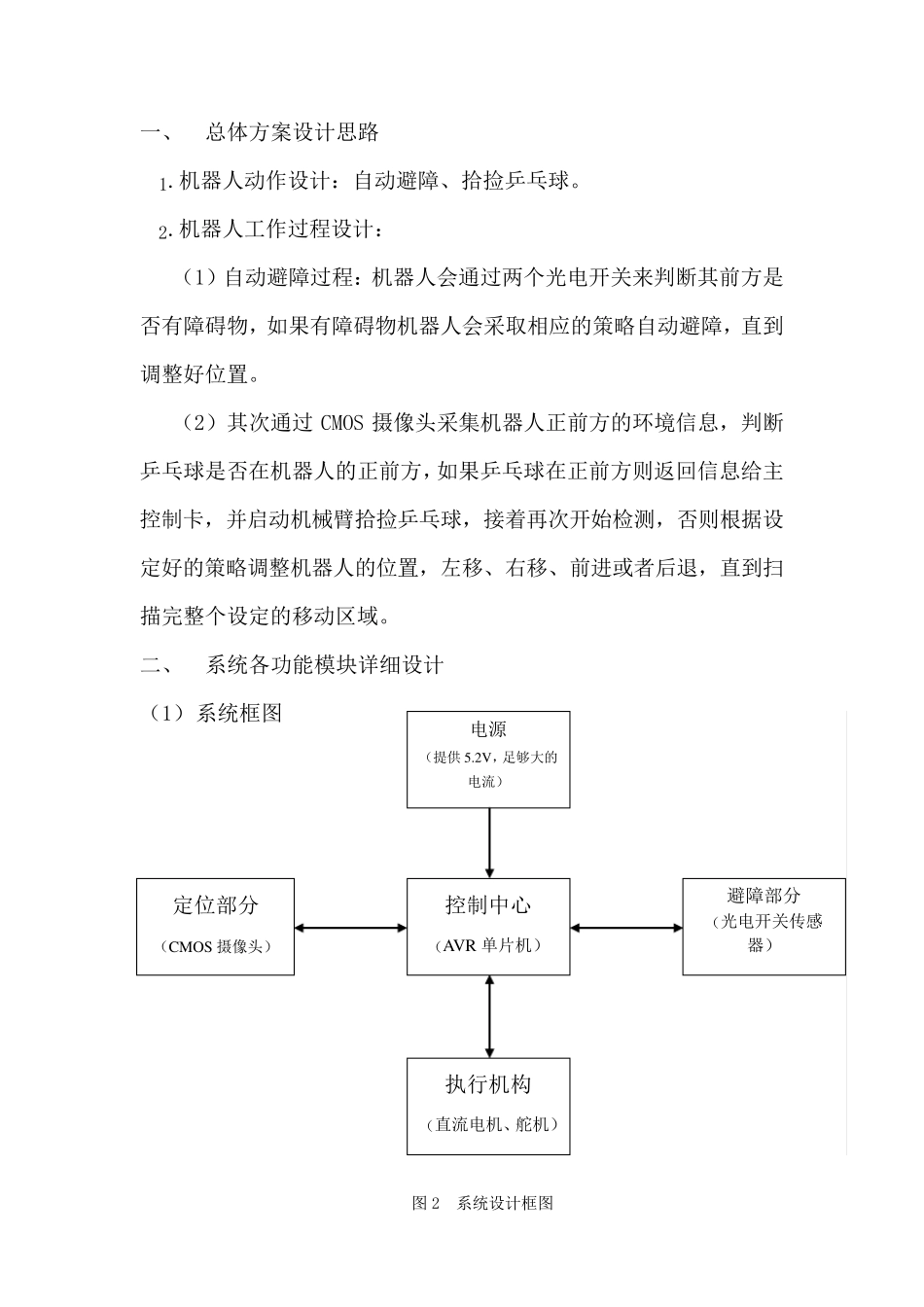
二、 系统各功能模块详细设计 (1) 系统框图 避障部分 (光电开关传感器) 控制中心 (AV R 单片机) 执行机构 (直流电机、舵机) 定位部分 (CMOS 摄像头) 电源 (提供 5
2V ,足够大的电流) 图 2 系统设计框图 (2) 模块说明 ①控制中心:采用机器人套件 MultiFle