第六章思考题与习题6
1 最小拍设计的要求是什么
在设计过程中怎样满足这些要求
它有什么局限性
答:最小拍控制是指系统在典型输入信号(如阶跃信号、 速度信号、 加速度信号等) 作用下,经过最少个采样周期使系统输出的稳态误差为零
最小拍控制系统也称最小拍无差系统或最小拍随动系统
显然这种系统对闭环脉冲传递函数的性能要求是快速性和准确性
因此, 事实上最小拍控制就是一类时间最优控制,系统的性能指标就是要求调节时间最短
最少拍控制的定义:所谓最少拍控制, 就是要求闭环系统对于某种特定的输入在最少个采样周期内达到无静差的稳态,且闭环脉冲传递函数具有以下形式式中 N 是可能情况下的最小正整数
这一形式表明闭环系统的脉冲响应在N 个采样周期后变为零,输出保持不变,从而意味着系统在N 拍之内达到稳态
最少拍系统的设计原则是:若系统广义被控对象G(z)无延迟且在z 平面单位圆上及单位圆外无零极点,要求选择闭环脉冲传递函数Ф(z),使系统在典型输入作用下,经最少采样周期后能使输出序列在各采样时刻的稳态误差为零,达到完全跟踪的目的,从而确定所需要的数字控制器的脉冲传递函数D(z)
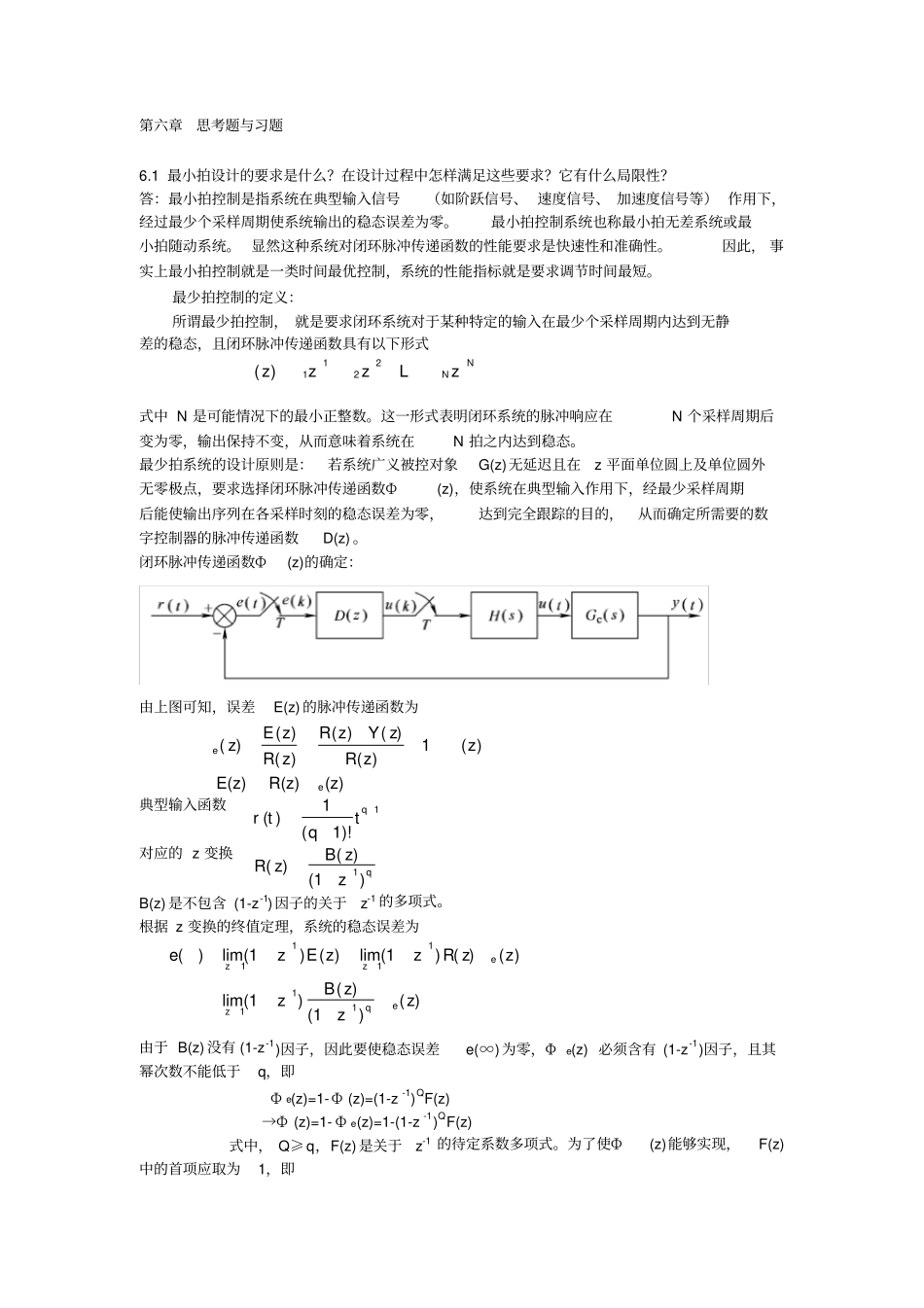
闭环脉冲传递函数Ф(z)的确定:由上图可知,误差E(z) 的脉冲传递函数为典型输入函数对应的 z 变换B(z) 是不包含 (1-z-1)因子的关于z-1 的多项式
根据 z 变换的终值定理,系统的稳态误差为由于 B(z) 没有 (1-z-1)因子,因此要使稳态误差e(∞)为零,Φe(z) 必须含有 (1-z-1)因子,且其幂次数不能低于q,即Ф e(z)=1- Ф (z)=(1-z-1)QF(z) →Ф (z)=1- Ф e(z)=1-(1-z-1)QF(z) 式中, Q≥q,F(z) 是关于z-1 的待定系数多项式
为了使Ф(z)能够实现,F(z)中的首项应取为1,即1212( )NNzzzzL( )( )(