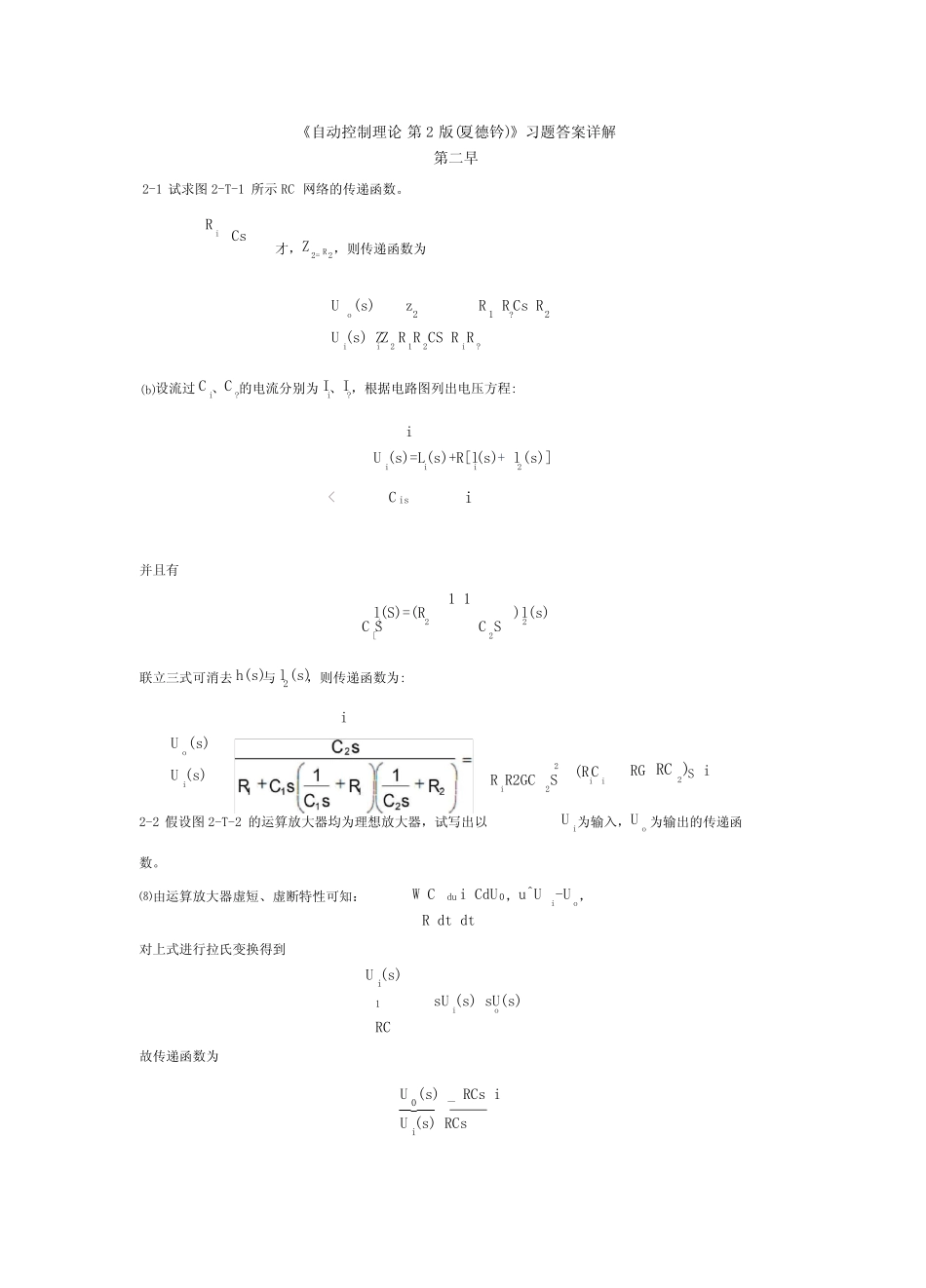
《 自 动 控 制 理 论 第 2 版 (夏 德 钤 )》 习 题 答 案 详 解 第 二 早 2-1 试 求 图 2-T-1 所 示 RC 网 络 的 传 递 函 数
U o(s) z2 R 1 R
Cs R2 Ui(s) Zi Z2 R1R2CS Ri R
(b)设 流 过 Ci、 C
的 电 流 分 别 为 Ii、 I
, 根 据 电 路 图 列 出 电 压 方 程 : ・ i Ui(s)=Li(s)+R[li(s) + l2(s)] < C is i 并 且 有 1 1 li(S)=(R2 )l2(s) C[S C2S 联 立 三 式 可 消 去 h(s)与 l2(s), 则 传 递 函 数 为 : 2-2 假 设 图 2-T-2 的 运 算 放 大 器 均 为 理 想 放 大 器 , 试 写 出 以 Ui为 输 入 , Uo 为 输 出 的 传 递 函 数
⑻ 由 运 算 放 大 器 虚 短 、 虚 断 特 性 可 知 : W C du i CdU 0, u^Ui -Uo, R dt dt 对 上 式 进 行 拉 氏 变 换 得 到 U i(s) 1 sUi(s) sUo(s) RC 故 传 递 函 数 为 U 0(s) _ RCs i U i(s) RCs Ri Cs 才 , Z2= R 2, 则 传 递 函 数 为 (RiCi RG RC2)S i i Uo(s) Ui(s) 2 Ri R2GC2S (b)由 运 放 虚 短 、 虚 断 特 性 有 : C 亚 -Ui 一 % =0 , U = 0, dt R 2 R
2 R2 R 2-3 试求图 2-T-3 中以电枢电压 ua 为输入量,以电动机的转角为输出量的微分方程式和传 递函数
解:设激磁磁通二= K fi f恒定
S = Cm" U a s s LaJs2 Laf RaJ s Ra f