大家好,通过以前的学习,我们已经对51 单片机综合学习系统的使用方法及学习方式有所了解与熟悉,学会了红外线遥控的基本知识,体会到了综合学习系统的易用性与易学性,这一期我们将一起学习步进电机控制的基本原理与使用方法
先看一下我们将要使用的51 单片机综合学习系统能完成哪些实验与产品开发工作:分别有流水灯,数码管显示,液晶显示,按键开关,蜂鸣器奏乐,继电器控制,IIC 总线,SPI 总线,PS/2 实验,AD 模数转换,光耦实验,串口通信,红外线遥控,无线遥控,温度传感,步进电机控制等等
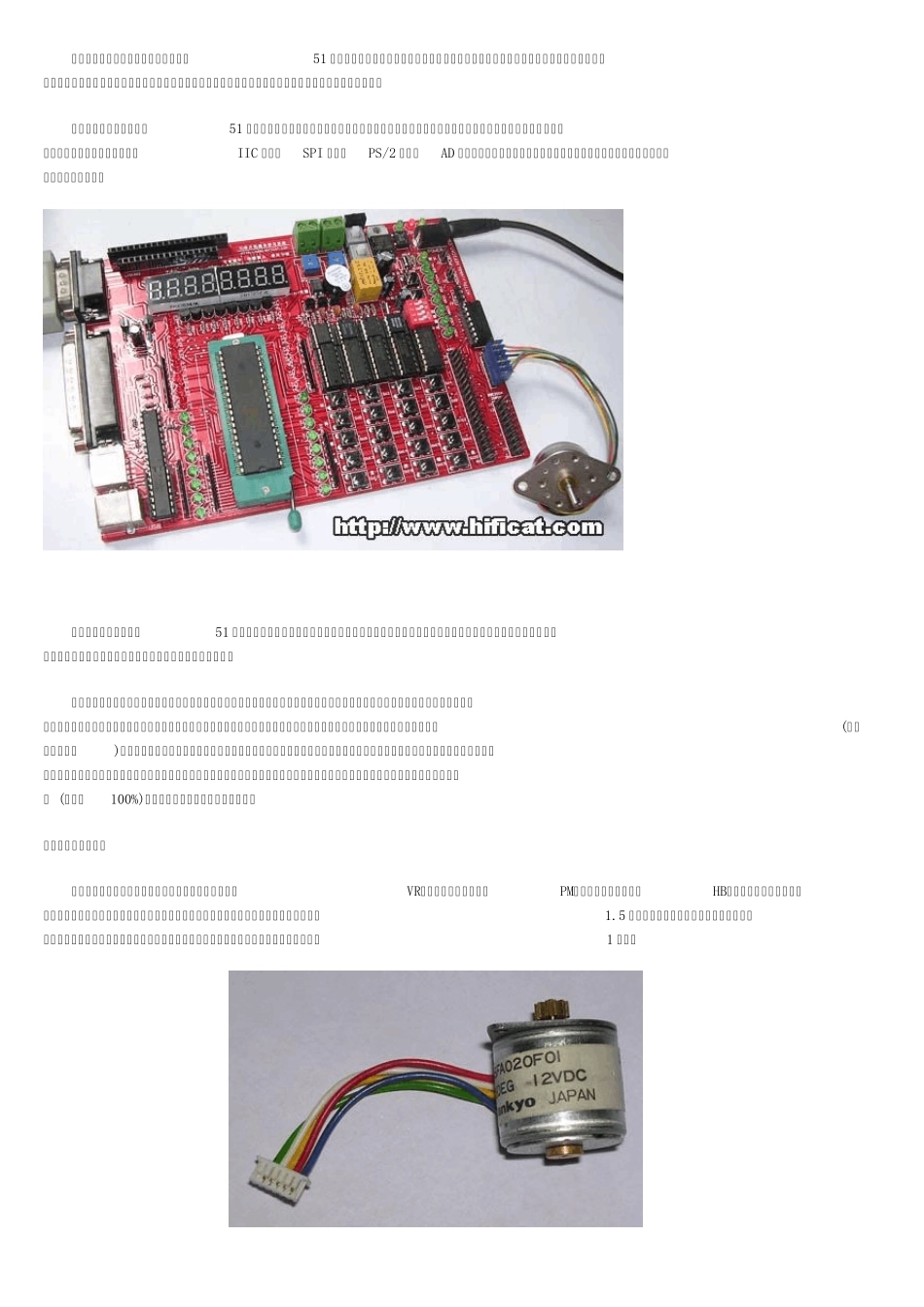
上图是我们将要使用的51 单片机综合学习系统硬件平台,本期实验我们用到了综合系统主机、步进电机,综合系统其它功能模块原理与使用详见前几期《电子制作》杂志及后期连载教程介绍
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的
步进电机可以作为一种控制用的特种电机,利用其没有积累误差 (精度为100%)的特点,广泛应用于各种开环控制
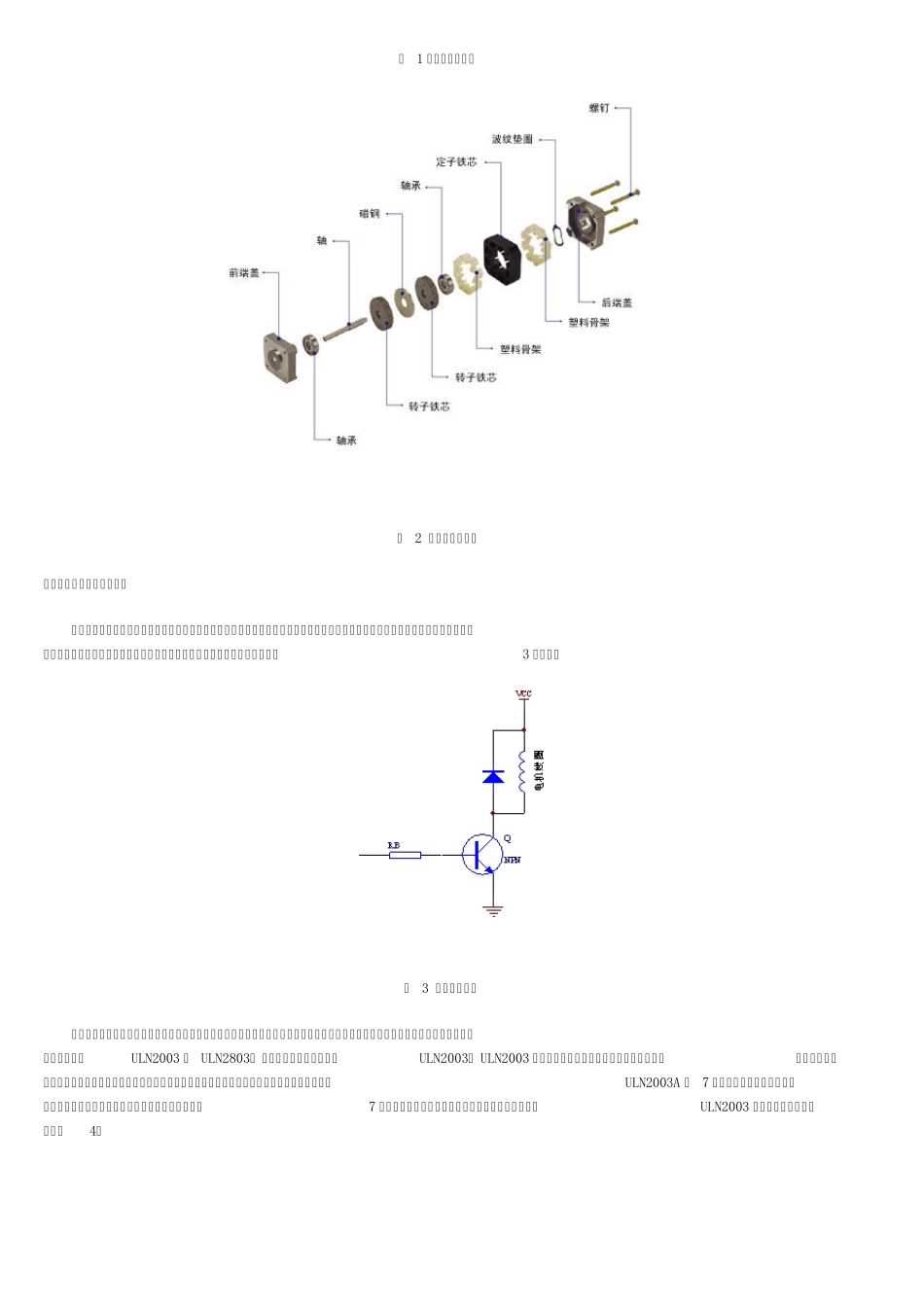
步进电机分类与结构 现在比较常用的步进电机分为三种:反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)
本章节以反应式步进电机为例,介绍其基本原理与应用方法
反应式步进电机可实现大转矩输出,步进角一般为1
反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩
常用小型步进电机的实物如图1 所示
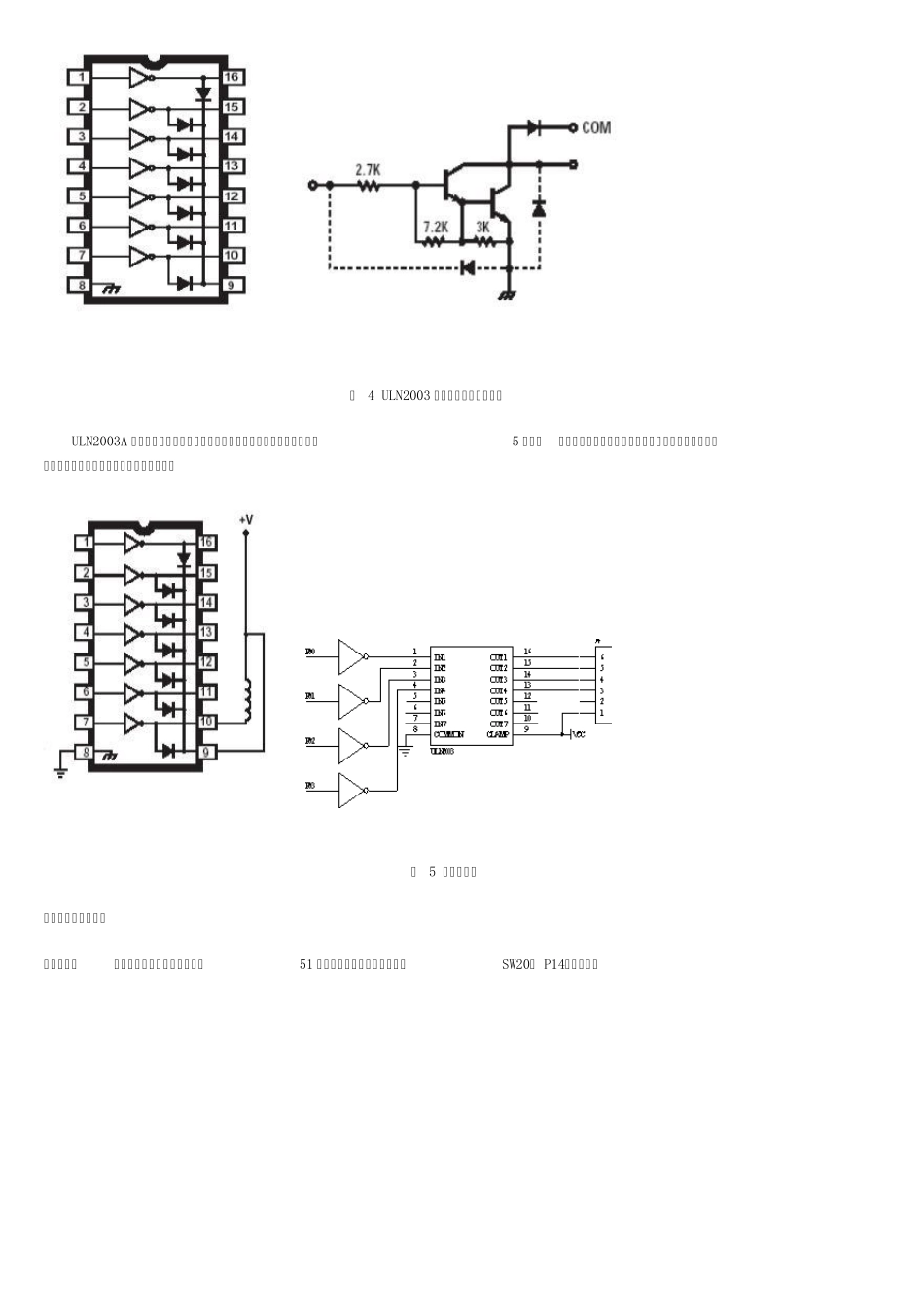
图 1 步进电机实物图 图 2 步进电机内