152 一般来说,)( jG的轨迹越接近与包围-1+j001j点,系统响应的震荡性越大
因此,)( jG的轨迹对01j点的靠近程度,可以用来度量稳定裕量(对条件稳定系统不适用)
在实际系统中常用相位裕量和增益裕量表示
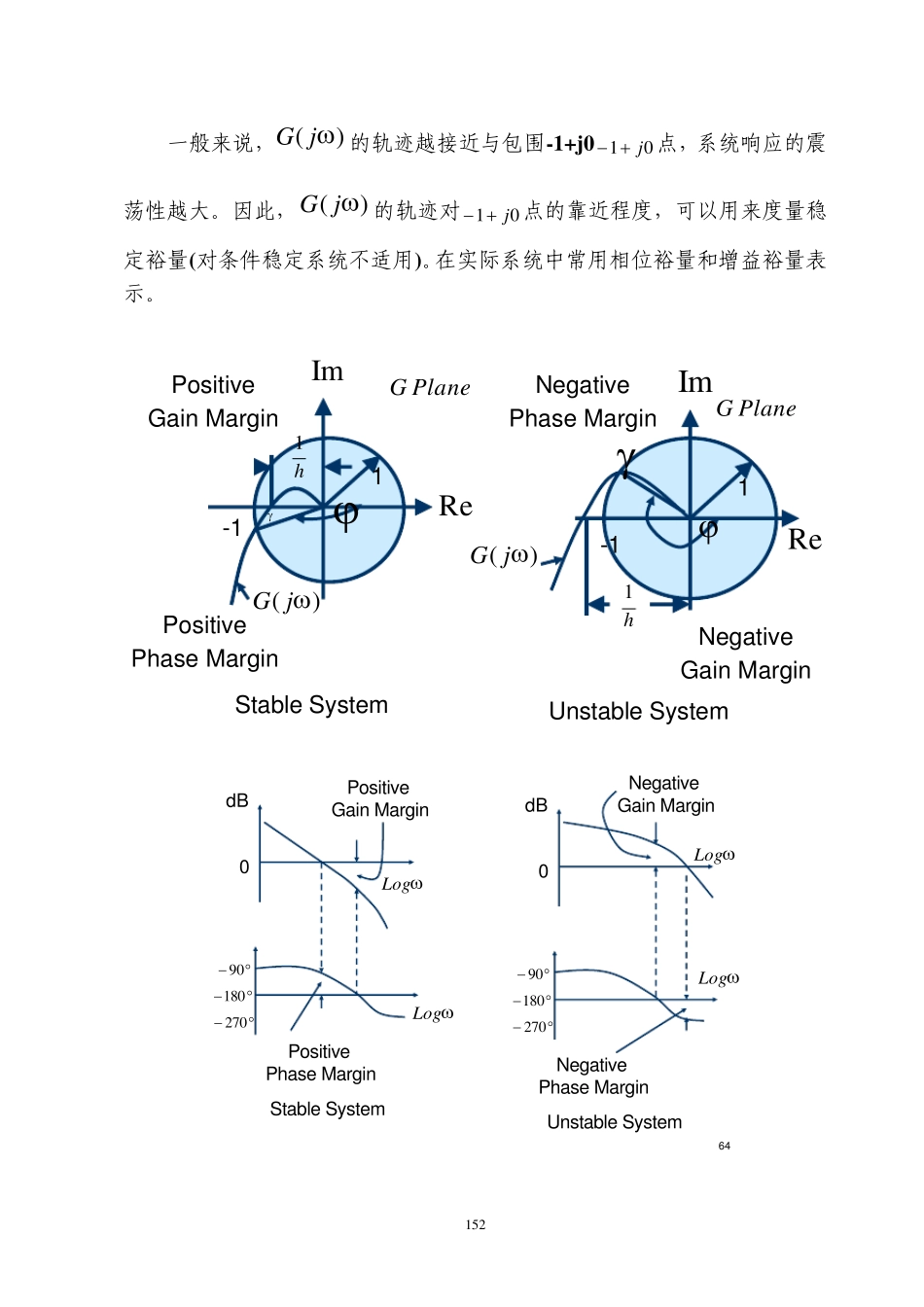
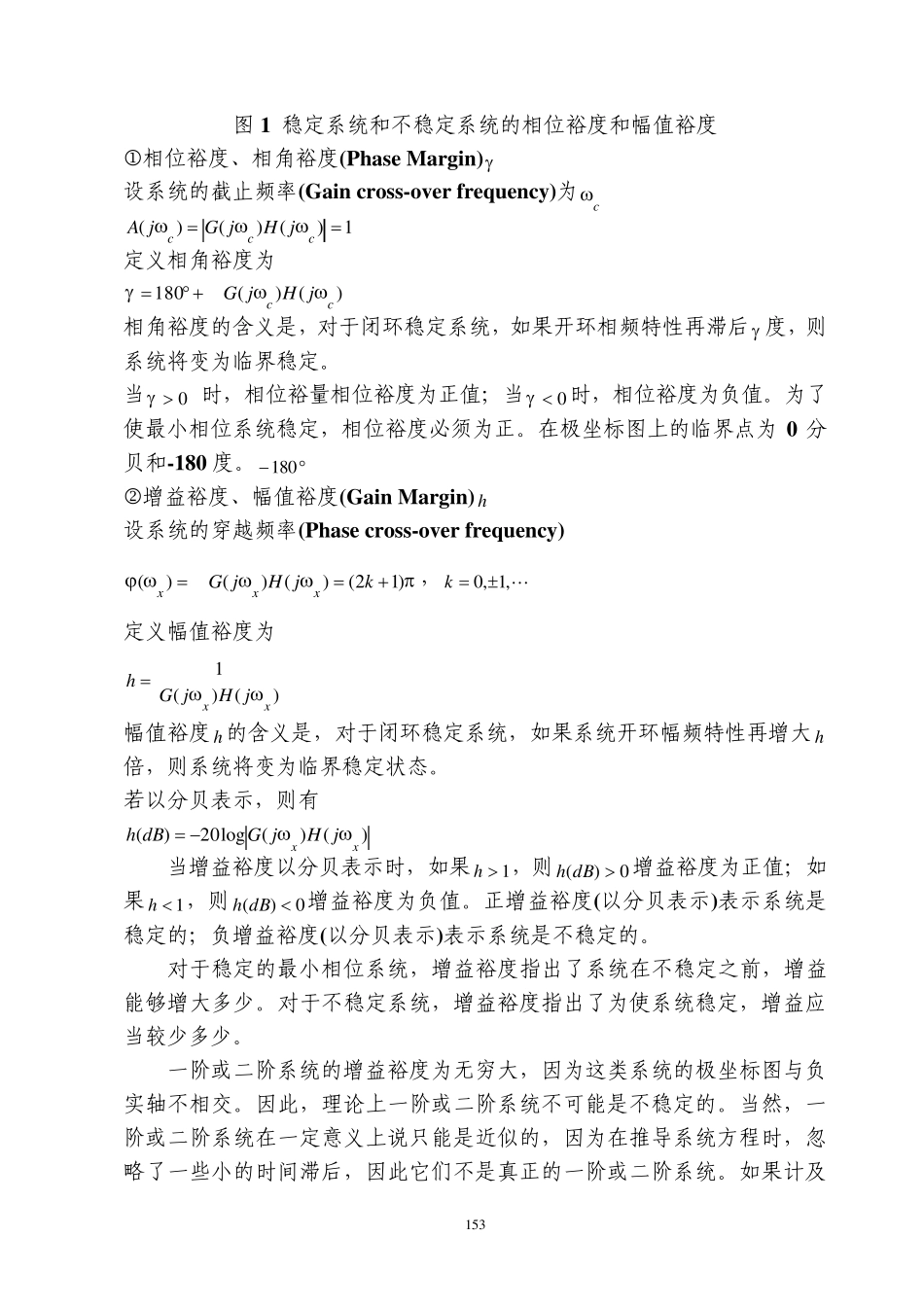
64Lo gLo gLo gLo g 90 270180Positiv e Gain MarginPositiv e Phase MarginNegativ e Gain MarginNegativ e Phase MarginStable Sy stemUnstable Sy stem0dB 90 2701800dB ReImh1Plan eGPositiv e Gain Margin Positiv e Phase Margin -1 1 ReImh1Negativ e Gain Margin Negativ e Phase Margin -1 1 Stable Sy stem Unstable Sy stem )( jG)( jGPlan eG 153 图1 稳定系统和不稳定系统的相位裕度和幅值裕度 相位裕度、相角裕度(Phase Margin) 设系统的截止频率(Gain cross-over frequency)为c 1)()()(cccjHjGjA 定义相角裕度为 )()(180ccjHjG 相角裕度的含义是,对于闭环稳定系统,如果开环相频特性再滞后 度,则系统将变为临界稳定
当0 时,相位裕量相位裕度为正值;当0时,相位裕度为负值
为了使最小相位系统稳定,相位裕度必须为正
在极坐标图上的临界点为 0 分贝和-180 度
180 增益裕度、幅值裕度(Gain Margin) h 设系统的穿越频率(Phase cross-over frequenc