第三章 零相位误差跟踪控制器设计 本文设计一种 ZPETC+DOB+CCC 的方法,用 ZPETC 来提高系统跟踪性,用 DOB 提高系统鲁棒性,用 CCC 对双轴解耦,提高位置精度
1 ZPETC 设计原理3
1 ZPETC 的基本原理零相位误差跟踪控制器(ZPETC)最早是由 Tomizuka 在 1987 年提出的[42]
ZPETC是结合零极点和相位对消的逆系统的方法,对消零点的情况下能够在较大的带宽范围内对闭环动态系统进行逆处理
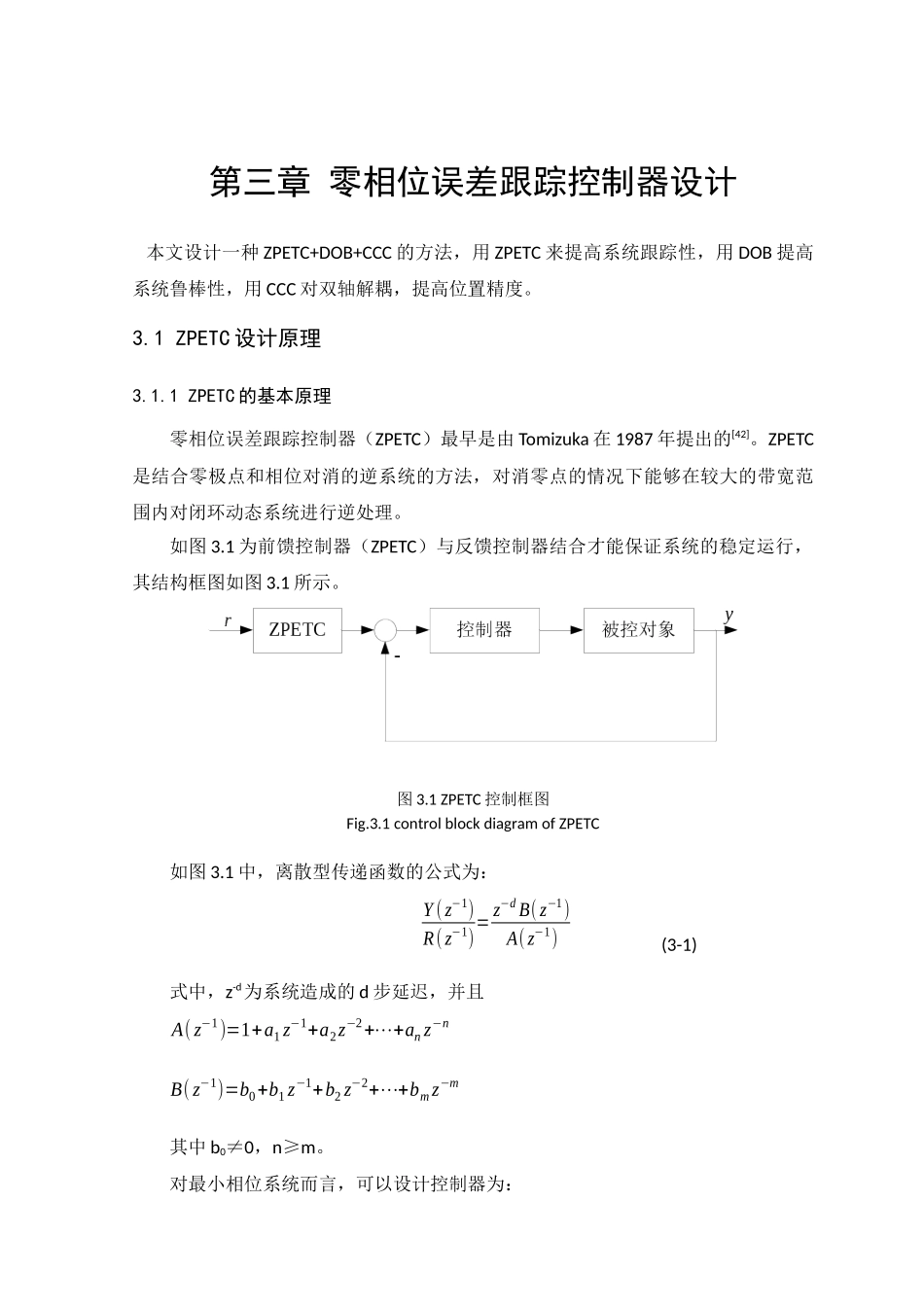
1 为前馈控制器(ZPETC)与反馈控制器结合才能保证系统的稳定运行,其结构框图如图 3
1 ZPETC 控制框图Fig
1 control block diagram of ZPETC如图 3
1 中,离散型传递函数的公式为:Y ( z−1)R( z−1)= z−d B( z−1)A(z−1) (3-1)式中,z-d为系统造成的 d 步延迟,并且A( z−1)=1+a1 z−1+a2z−2+⋯+an z−nB( z−1)=b0+b1 z−1+b2 z−2+⋯+bmz−m其中 b0≠0,n≥m
对最小相位系统而言,可以设计控制器为:第三章 零相位误差跟踪控制器设计Pf ( z−1)= zd A(z−1)B( z−1) (3
2)工程中 ZPETC 经常采用最小相位系统设计的原因是含有不稳定零点,如果采用以上方法能实现良好的控制效果[44]
将闭环回路 B(z-1)分成两部分:B(z−1)=Bu( z−1)Bc(z−1) (3
4)Bc(z-1)包含前馈的极点对消的零点;Bu(z-1)包含不能与前馈控制器极点对消的零点;因此式 3
1 可以表示为:Y ( z−1)R( z−1)= z−d B( z−1)A( z−1)=z−d Bc( z−1)Bu( z−1)A( z−1) (3
5)可以得到 ZPET