课程实验报告院系:专业:班级:课程号:姓名学号组别第组实验工程工业机器人初识实验类型验证性 完成 时间年 月 日实验序号01【实验目的及要求】1、了解关节型工业机器人根本构成模块;2、理解关节型工业机器人自由度与关节的关系;3、掌握工业机器人系统组成框图
1、实验设备:〔1〕TOWIN-12kg 六自由度关节型工业机器人一台;〔2〕TOWIN-20kg 六自由度关节型工业机器人一台;〔3〕TOWIN-20kg 五自由度 SCARA 型工业机器人一台;〔4〕并联机器人一台
2、实验步骤:〔1〕观察和研究分析工业机器人根本结构;〔2〕观察并记录电气柜内部元器件;〔3〕观察分析工业机器人关节分布和电机驱动传动机构;3、实验内容〔实验的操作过程,关键操作,处理方式等〕1
工业机器人简介工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执 行工作,是靠自身动力和限制水平来实现各种功能的一种机器
它可以接受人类指挥, 也可以根据预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的 原那么纲领行动
【教师评语】〔设计性、综合 性,创新型综合实验必填此栏〕成绩实验教师签名批阅日期2
工业机器人组成局部2
1 机械结构2
1 关节的分类机器人有许多不同类型的关节,有线性的、旋转的滑动的或球型的
虽然球关节 在许多系统中使用很普遍,但是由于拥有多个自由度且难以限制,所以在机器人中除 了用于研究外并不常用
大多数机器人关节是线性或旋转型关节
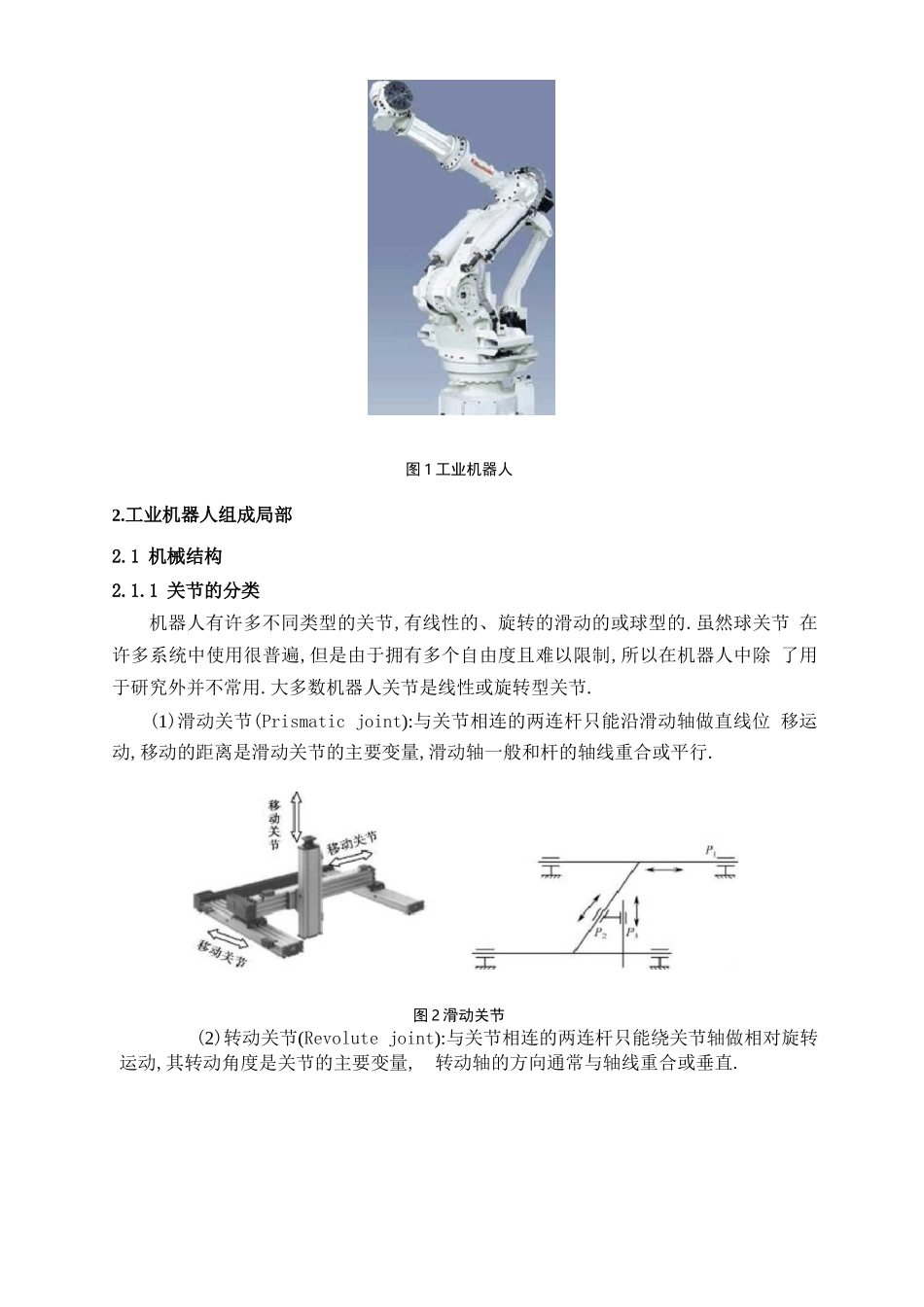
(1)滑动关节(Prismatic joint):与关节相连的两连杆只能沿滑动轴做直线位 移运动,移动的距离是滑动关节的主要变量,滑动轴一般和杆的轴线重合或平行
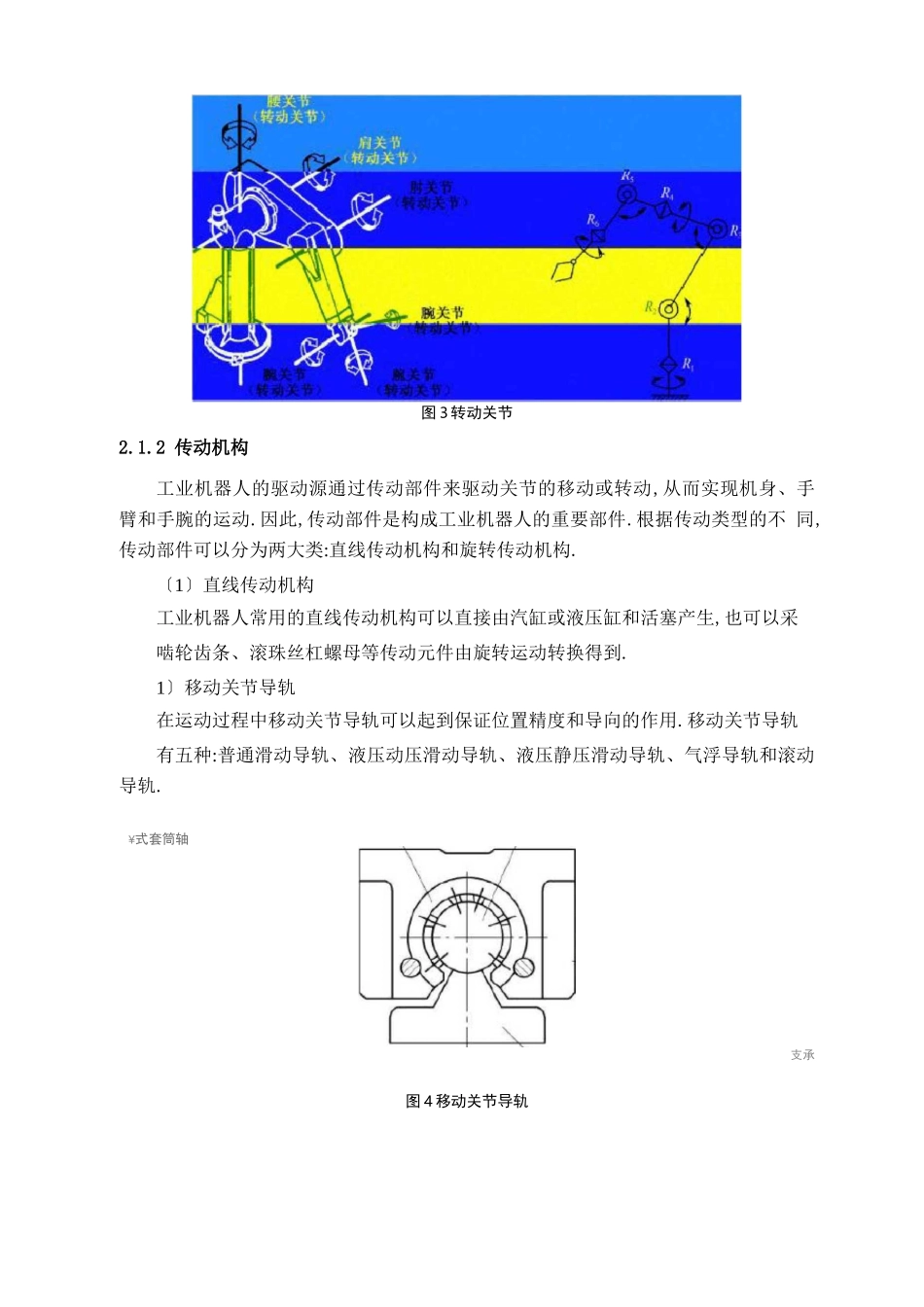
(2)转动关节(Revolute joint):与关节相连的两连杆只能绕关节轴做相对旋转运动,其转动角度是关节的主要变量,转动轴的方向通常与轴线重合或