第2章平面机构运动简图及自由度2
2平面运动机构简图2
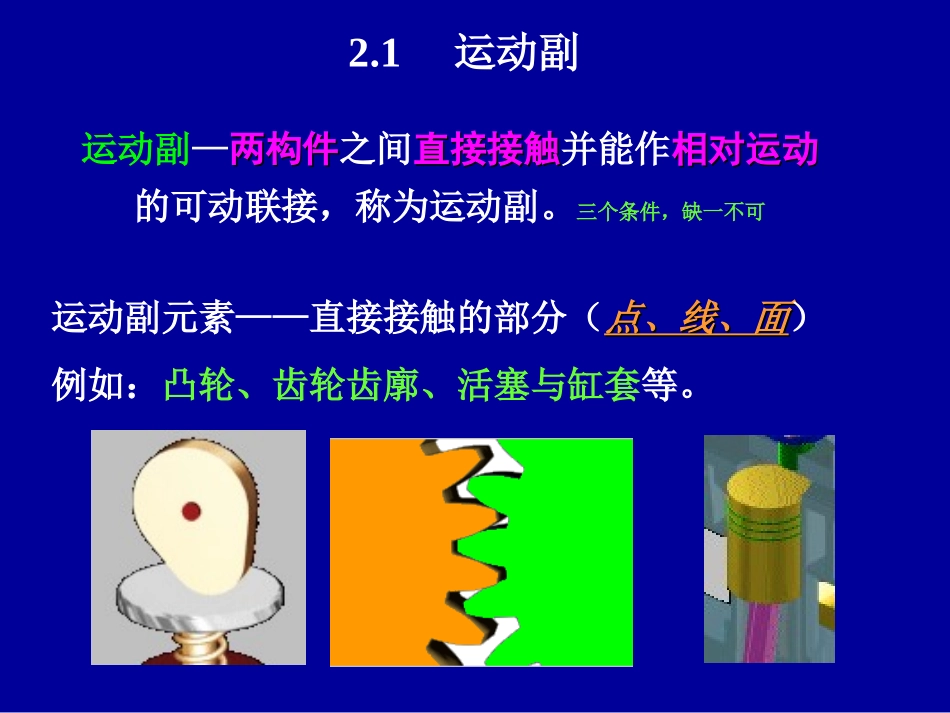
3平面机构的自由度运动副元素——直接接触的部分(点、线、面点、线、面)例如:凸轮、齿轮齿廓、活塞与缸套等
1运动副运动副—两构件两构件之间直接接触直接接触并能作相对运动相对运动的可动联接,称为运动副
三个条件,缺一不可运动副的分类运动副的分类平面运动副低副(面)高副(点或线)移动副(直线运动)回转副(转动)空间运动副根据两构件两构件的相对运动轨迹相对运动轨迹根据两构件两构件的接触部分接触部分1.低副移动副-两构件间的相对运动为直线运动直线运动回转副-两构件间的相对运动为转动转动见仿真动画见仿真动画(面)举例举例--见见版图动画轴的结构2.高副凸轮高副见仿真动画见仿真动画齿轮高副(点或线)空间运动副-两构件的相对运动为空间运动
球面副螺旋副见仿真动画见仿真动画球销副2
2平面机构运动简图机构运动简图:实际构件的外形和结构往往很复杂,为使问题实际构件的外形和结构往往很复杂,为使问题简化,用简单线条和符号来表示构件和运动副,按简化,用简单线条和符号来表示构件和运动副,按比例定出各运动副的位置
这种说明机构各构件间比例定出各运动副的位置
这种说明机构各构件间相对运动关系的简化图形.称为相对运动关系的简化图形.称为~~
本节主要应解决的问题:如何用简单线条和符号绘制的机构运动简图来表示实际机械
构件的表示方法可以组成两个运动副的构件构件的表示方法可以组成三个运动副的构件运动副的表示方法运动副的表示方法::(1)a、b、c是由两个构件组成转动副的表示方法
用圆圈表示转动副.其圆心代表相对转动轴线
(2)d、e、f是两构件组成移动副的表示方法,移动副的导路必须与相对移动方向一致
图中画阴影线的构件表示机架
(3)两构件组成高副时,在简图中应当画出两构件接触处的曲线轮廓.自卸货车自卸货车抽水机构抽水机构缝纫机下针