25 习题四 可逆直流调速系统和位置随动系统 4-1 晶闸管-电动机系统需要快速回馈制动时,为什么必须采用可逆线路
答: 在晶闸管-电动机调速系统中,只要是需要快速的回馈制动,常常也采用两组反并联的晶闸管装置,由正组提供电动运行所需的整流供电,反组只提供逆变制动
这时,两组晶闸管装置的容量大小可以不同,反组只在短时间内给电动机提供制动电流,并不提供稳态运行的电流,实际采用的容量可以小一些
4-2 晶闸管装置供电的晶闸管-电动机(V-M)系统, 在整流和逆变状态下的机械特性,并分析这种机械特性适合于何种性质的负载
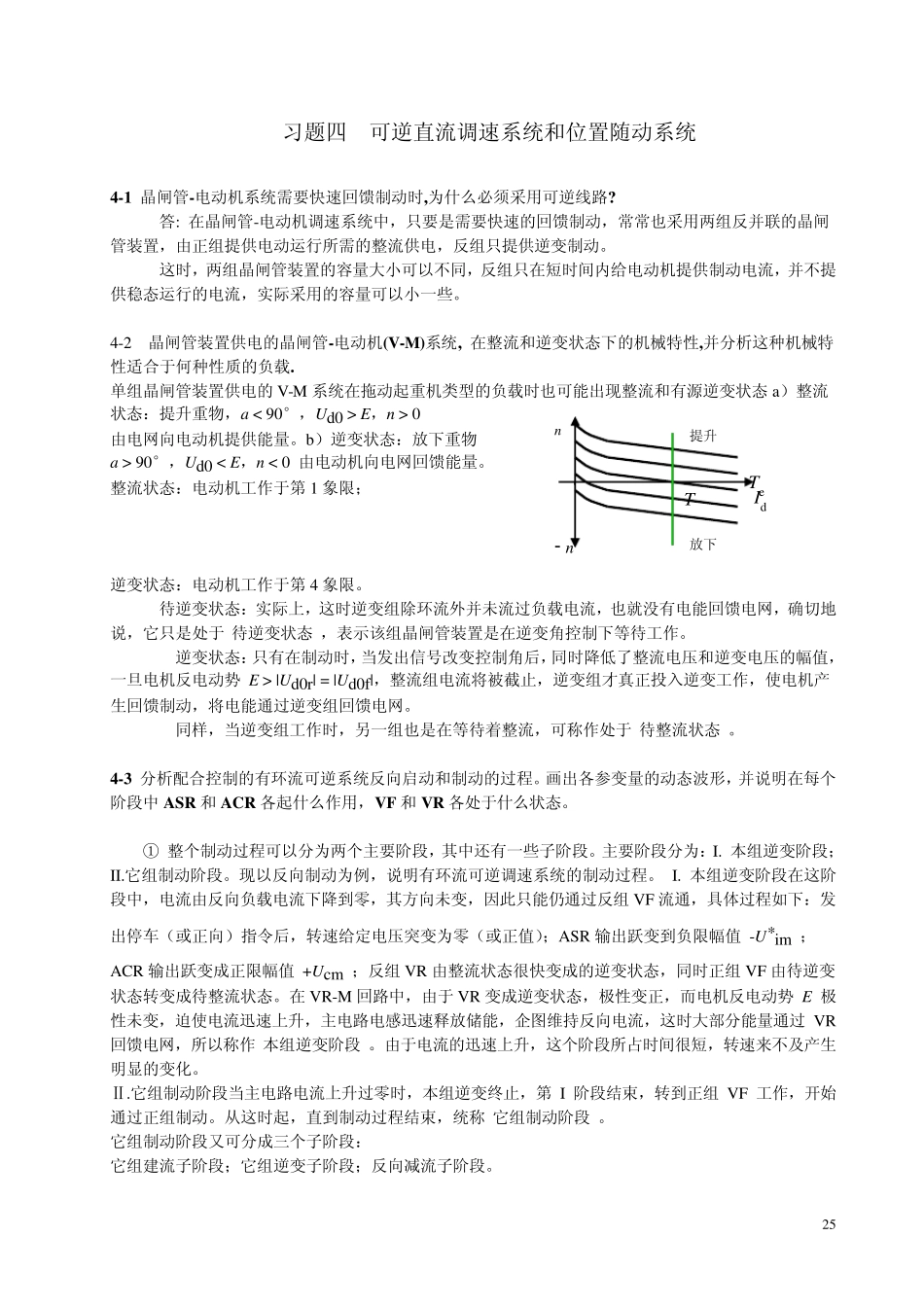
单组晶闸管装置供电的V-M 系统在拖动起重机类型的负载时也可能出现整流和有源逆变状态a)整流状态:提升重物,a < 90°,Ud0 > E,n > 0 由电网向电动机提供能量
b)逆变状态:放下重物 a > 90°,Ud0 < E,n < 0 由电动机向电网回馈能量
整流状态:电动机工作于第 1 象限; 逆变状态:电动机工作于第 4 象限
待逆变状态:实际上,这时逆变组除环流外并未流过负载电流,也就没有电能回馈电网,确切地说,它只是处于―待逆变状态‖,表示该组晶闸管装置是在逆变角控制下等待工作
逆变状态:只有在制动时,当发出信号改变控制角后,同时降低了整流电压和逆变电压的幅值,一旦电机反电动势 E > |Ud0r| = |Ud0f|,整流组电流将被截止,逆变组才真正投入逆变工作,使电机产生回馈制动,将电能通过逆变组回馈电网
同样,当逆变组工作时,另一组也是在等待着整流,可称作处于―待整流状态‖
4-3 分析配合控制的有环流可逆系统反向启动和制动的过程
画出各参变量的动态波形,并说明在每个阶段中ASR 和ACR 各起什么作用,V F 和VR 各处于什么状态
① 整个制动过程可以分为两个主要阶段,其中还有一些子阶段
主要阶段分为:I
本组逆变阶段;