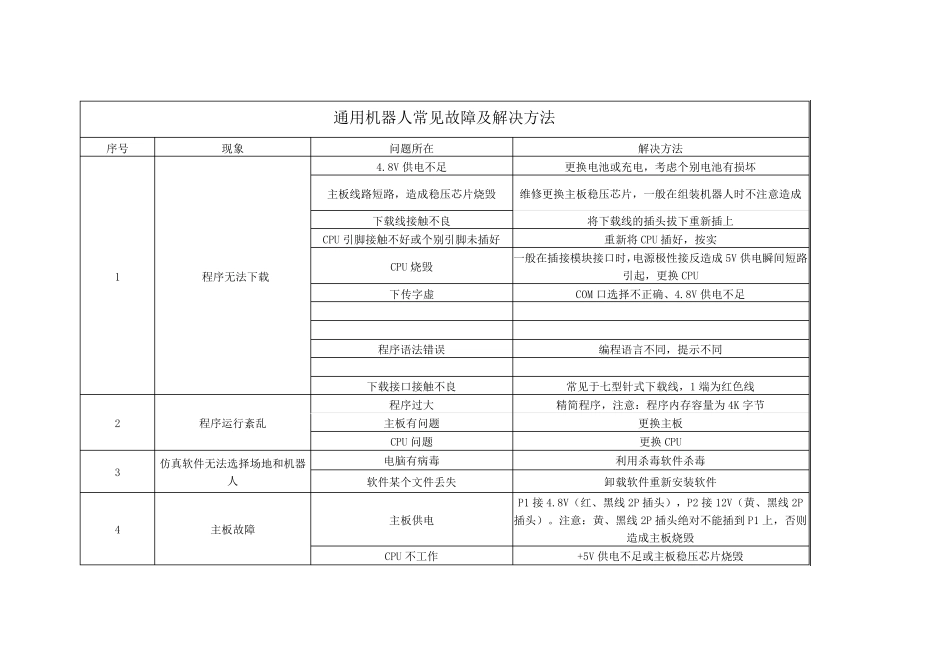
通用机器人常见故障及解决方法 序号 现象 问题所在 解决方法 1 程序无法下载 4
8V 供电不足 更换电池或充电,考虑个别电池有损坏 主板线路短路,造成稳压芯片烧毁 维修更换主板稳压芯片,一般在组装机器人时不注意造成 下载线接触不良 将下载线的插头拔下重新插上 CPU 引脚接触不好或个别引脚未插好 重新将CPU 插好,按实 CPU 烧毁 一般在插接模块接口时,电源极性接反造成5V 供电瞬间短路引起,更换CPU 下传字虚 COM 口选择不正确、4
8V 供电不足 程序语法错误 编程语言不同,提示不同 下载接口接触不良 常见于七型针式下载线,1 端为红色线 2 程序运行紊乱 程序过大 精简程序,注意:程序内存容量为 4K 字节 主板有问题 更换主板 CPU 问题 更换CPU 3 仿真软件无法选择场地和机器人 电脑有病毒 利用杀毒软件杀毒 软件某个文件丢失 卸载软件重新安装软件 4 主板故障 主板供电 P1 接4
8V(红、黑线2P 插头),P2 接12V(黄、黑线2P插头)
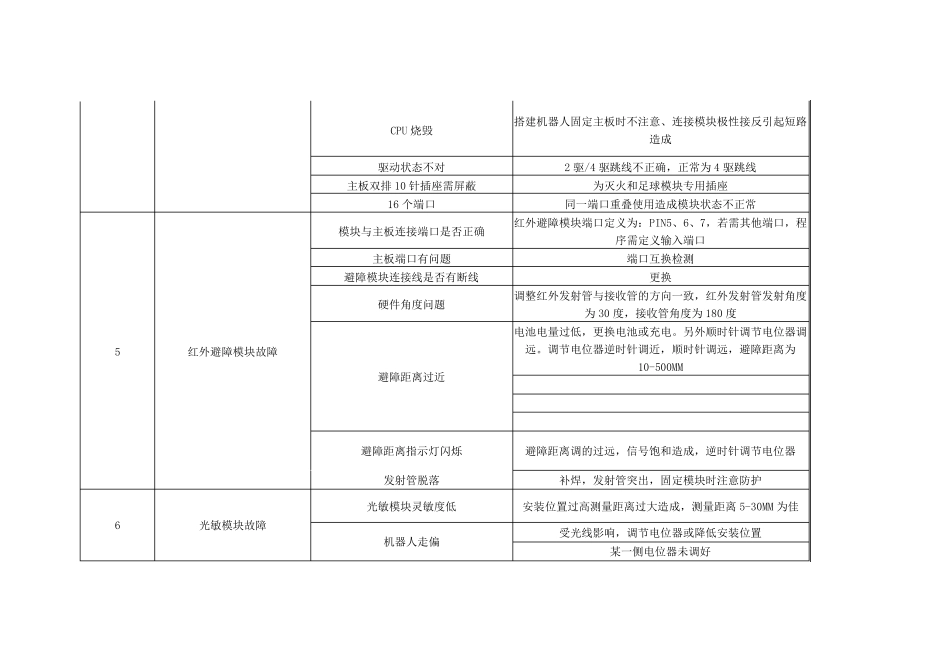
注意:黄、黑线2P 插头绝对不能插到P1 上,否则造成主板烧毁 CPU 不工 作 +5V 供电不足或主板稳压芯片烧毁 CPU 烧毁 搭建机器人固定主板时不注意、连接模块极性接反引起短路造成 驱动状态不对 2 驱/4 驱跳线不正确,正常为 4 驱跳线 主板双排 10 针插座需屏蔽 为灭火和足球模块专用插座 16 个端口 同一端口重叠使用造成模块状态不正常 5 红外避障模块故障 模块与主板连接端口是否正确 红外避障模块端口定义为:PIN5、6、7,若需其他端口,程序需定义输入端口 主板端口有问题 端口互换检测 避障模块连接线是否有断线 更换 硬件角度问题 调整红外发射管与接收管的方向一致,红外发射管发射角度为 30 度,接收管角度为 180 度 避障距离过近 电池电量过低,更换电池或充电
另外顺时针调节电位器